 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenEraser: Generalizable Video Object Removal via Balanced Text-Mask Guidance and Decoupled Locator-Preserver
May 28, 2026Video object removal frequently struggles to simultaneously eliminate target objects and their associated physical effects (e.g., smoke, reflections, light, and ripples) in out-of-domain scenarios due to complex spatiotemporal ambiguities. While existing methods primarily rely on spatial masks, they often fail to capture weakly correlated effects, and the potential of explicit textual guidance remains underexplored. Furthermore, a fundamental optimization conflict exists in removal models between high-level semantic generalization and precise pixel-level background preservation. To address these challenges, we propose GenEraser, a novel framework for generalized and high-fidelity video object and effect removal. First, we introduce a Multi-Conditional Mixture-of-Experts (MC-MoE) paired with Bipartite Text guidance to fully exploit the multimodal priors of Diffusion Transformers, significantly enhancing the identification of complex effects. Second, a Learnable Deep ``CFG'' Fusion mechanism (LD-CFG) is developed to adaptively balance the relative dominance of mask and textual conditions across diverse scenarios. Finally, we propose a Decoupled Expert Architecture, comprising a Locator and a Preserver, to mitigate the inherent trade-off between semantic generalization and pixel alignment. Extensive experiments demonstrate that our GenEraser surpasses recent state-of-the-art approaches, achieving significant quantitative improvements (e.g., $2.16$ dB and $1.44$ dB on the ROSE Benchmark and VOR-Eval, respectively) while maintaining exceptionally robust generalization in open-world scenarios. https://cyqii.github.io/GenEraser.github.io/
VMGNet: A Low Computational Complexity Robotic Grasping Network Based on VMamba with Multi-Scale Feature Fusion
Nov 19, 2024



While deep learning-based robotic grasping technology has demonstrated strong adaptability, its computational complexity has also significantly increased, making it unsuitable for scenarios with high real-time requirements. Therefore, we propose a low computational complexity and high accuracy model named VMGNet for robotic grasping. For the first time, we introduce the Visual State Space into the robotic grasping field to achieve linear computational complexity, thereby greatly reducing the model's computational cost. Meanwhile, to improve the accuracy of the model, we propose an efficient and lightweight multi-scale feature fusion module, named Fusion Bridge Module, to extract and fuse information at different scales. We also present a new loss function calculation method to enhance the importance differences between subtasks, improving the model's fitting ability. Experiments show that VMGNet has only 8.7G Floating Point Operations and an inference time of 8.1 ms on our devices. VMGNet also achieved state-of-the-art performance on the Cornell and Jacquard public datasets. To validate VMGNet's effectiveness in practical applications, we conducted real grasping experiments in multi-object scenarios, and VMGNet achieved an excellent performance with a 94.4% success rate in real-world grasping tasks. The video for the real-world robotic grasping experiments is available at https://youtu.be/S-QHBtbmLc4.
High-performance automated abstract screening with large language model ensembles
Nov 03, 2024



Large language models (LLMs) excel in tasks requiring processing and interpretation of input text. Abstract screening is a labour-intensive component of systematic review involving repetitive application of inclusion and exclusion criteria on a large volume of studies identified by a literature search. Here, LLMs (GPT-3.5 Turbo, GPT-4 Turbo, GPT-4o, Llama 3 70B, Gemini 1.5 Pro, and Claude Sonnet 3.5) were trialled on systematic reviews in a full issue of the Cochrane Library to evaluate their accuracy in zero-shot binary classification for abstract screening. Trials over a subset of 800 records identified optimal prompting strategies and demonstrated superior performance of LLMs to human researchers in terms of sensitivity (LLMmax = 1.000, humanmax = 0.775), precision (LLMmax = 0.927, humanmax = 0.911), and balanced accuracy (LLMmax = 0.904, humanmax = 0.865). The best performing LLM-prompt combinations were trialled across every replicated search result (n = 119,691), and exhibited consistent sensitivity (range 0.756-1.000) but diminished precision (range 0.004-0.096). 66 LLM-human and LLM-LLM ensembles exhibited perfect sensitivity with a maximal precision of 0.458, with less observed performance drop in larger trials. Significant variation in performance was observed between reviews, highlighting the importance of domain-specific validation before deployment. LLMs may reduce the human labour cost of systematic review with maintained or improved accuracy and sensitivity. Systematic review is the foundation of evidence-based medicine, and LLMs can contribute to increasing the efficiency and quality of this mode of research.
A Robot Leg with Compact Variable Stiffness Joint based on Leaf-Spring Mechanism
Aug 27, 2023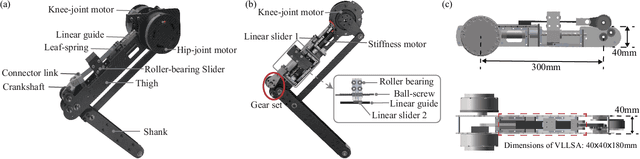
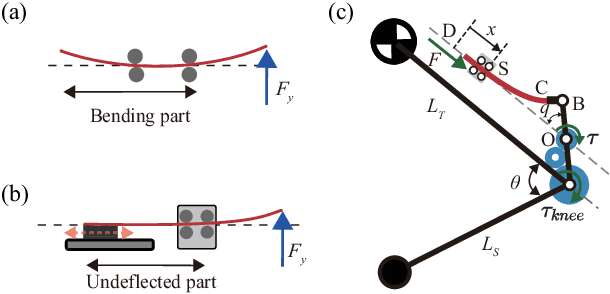
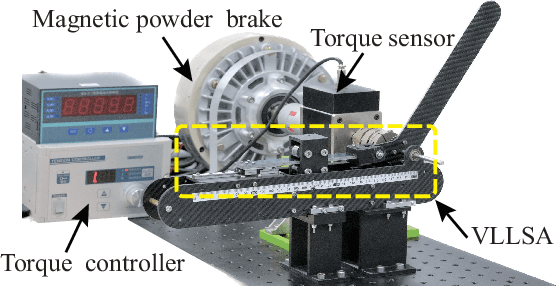

The legged robots with variable stiffness actuators (VSAs) can achieve energy-efficient and versatile locomotion. However, equipping legged robots with VSAs in real-world application is usually restricted by (i) the redundant mechanical structure design, (ii) limited stiffness variation range and speed, and (iii) high energy consumption in stiffness modulation. In this paper, we present a novel Variable-Length Leaf-Spring Actuator (VLLSA) in legged robots that aims to address the aforementioned limitations. The design is based on leaf-spring mechanism and we improve the structural design to make the proposed VSA (i) compact and lightweight in mechanical structure, (ii) precise in theoretical modeling, and (iii) capable of modulating stiffness with wide range, fast speed, and low energy consumption. Hardware experiments validate that the legged robot equipped with the proposed VLLSA has compact structure, high dynamic performance and low energy consumption.
Design and Control of a Bio-inspired Wheeled Bipedal Robot
Aug 25, 2023Wheeled bipedal robots have the capability to execute agile and versatile locomotion tasks in unknown terrains, with balancing being a key criteria in evaluating their dynamic performance. This paper focuses on enhancing the balancing performance of wheeled bipedal robots through innovations in both hardware and software aspects. A bio-inspired mechanical design, inspired by the human barbell squat, is proposed and implemented to achieve an efficient distribution of load onto the limb joints. This design improves knee torque joint efficiency and facilitates control over the distribution of the center of mass (CoM). Meanwhile, a customized balance model, namely the wheeled linear inverted pendulum (wLIP), is developed. The wLIP surpasses other alternatives by providing a more accurate estimation of wheeled robot dynamics while ensuring balancing stability. Experimental results demonstrate that the robot is capable of maintaining balance while manipulating pelvis states and CoM velocity; furthermore, it exhibits robustness against external disturbances and unknown terrains.