 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robot Leg with Compact Variable Stiffness Joint based on Leaf-Spring Mechanism
Aug 27, 2023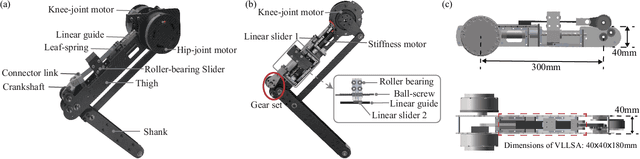
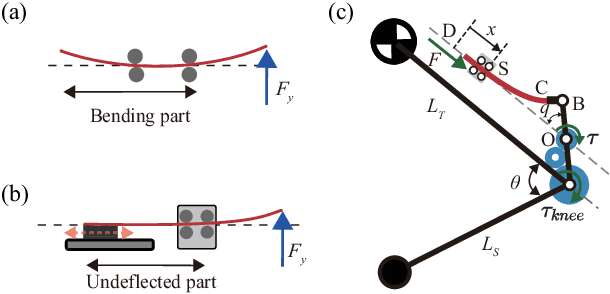
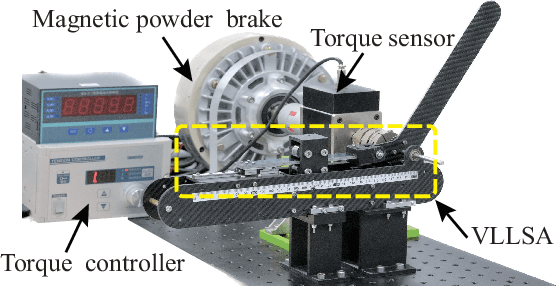

The legged robots with variable stiffness actuators (VSAs) can achieve energy-efficient and versatile locomotion. However, equipping legged robots with VSAs in real-world application is usually restricted by (i) the redundant mechanical structure design, (ii) limited stiffness variation range and speed, and (iii) high energy consumption in stiffness modulation. In this paper, we present a novel Variable-Length Leaf-Spring Actuator (VLLSA) in legged robots that aims to address the aforementioned limitations. The design is based on leaf-spring mechanism and we improve the structural design to make the proposed VSA (i) compact and lightweight in mechanical structure, (ii) precise in theoretical modeling, and (iii) capable of modulating stiffness with wide range, fast speed, and low energy consumption. Hardware experiments validate that the legged robot equipped with the proposed VLLSA has compact structure, high dynamic performance and low energy consumption.
Design and Control of a Bio-inspired Wheeled Bipedal Robot
Aug 25, 2023Wheeled bipedal robots have the capability to execute agile and versatile locomotion tasks in unknown terrains, with balancing being a key criteria in evaluating their dynamic performance. This paper focuses on enhancing the balancing performance of wheeled bipedal robots through innovations in both hardware and software aspects. A bio-inspired mechanical design, inspired by the human barbell squat, is proposed and implemented to achieve an efficient distribution of load onto the limb joints. This design improves knee torque joint efficiency and facilitates control over the distribution of the center of mass (CoM). Meanwhile, a customized balance model, namely the wheeled linear inverted pendulum (wLIP), is developed. The wLIP surpasses other alternatives by providing a more accurate estimation of wheeled robot dynamics while ensuring balancing stability. Experimental results demonstrate that the robot is capable of maintaining balance while manipulating pelvis states and CoM velocity; furthermore, it exhibits robustness against external disturbances and unknown terrains.