 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-R: A Framework for Domain-Adaptive Maintenance Scheme Generation Combining Hierarchical Agents and RAG
Nov 07, 2024



The increasing use of smart devices has emphasized the critical role of maintenance in production activities. Interactive Electronic Technical Manuals (IETMs) are vital tools that support the maintenance of smart equipment. However, traditional IETMs face challenges such as transitioning from Graphical User Interfaces (GUIs) to natural Language User Interfaces (LUIs) and managing complex logical relationships. Additionally, they must meet the current demands for higher intelligence. This paper proposes a Maintenance Scheme Generation Method based on Large Language Models (LLM-R). The proposed method includes several key innovations: We propose the Low Rank Adaptation-Knowledge Retention (LORA-KR) loss technology to proportionally adjust mixed maintenance data for fine-tuning the LLM. This method prevents knowledge conflicts caused by mixed data, improving the model's adaptability and reasoning ability in specific maintenance domains, Besides, Hierarchical Task-Based Agent and Instruction-level Retrieval-Augmented Generation (RAG) technologies are adopted to optimize the generation steps and mitigate the phenomenon of hallucination caused by the model's Inability to access contextual information. This enhancement improves the model's flexibility and accuracy in handling known or unknown maintenance objects and maintenance scheme scenarios. To validate the proposed method's effectiveness in maintenance tasks, a maintenance scheme dataset was constructed using objects from different fields. The experimental results show that the accuracy of the maintenance schemes generated by the proposed method reached 91.59%, indicating which improvement enhances the intelligence of maintenance schemes and introduces novel technical approaches for equipment maintenance.
BeSimulator: A Large Language Model Powered Text-based Behavior Simulator
Sep 24, 2024



Traditional robot simulators focus on physical process modeling and realistic rendering, often suffering from high computational costs, inefficiencies, and limited adaptability. To handle this issue, we propose Behavior Simulation in robotics to emphasize checking the behavior logic of robots and achieving sufficient alignment between the outcome of robot actions and real scenarios. In this paper, we introduce BeSimulator, a modular and novel LLM-powered framework, as an attempt towards behavior simulation in the context of text-based environments. By constructing text-based virtual environments and performing semantic-level simulation, BeSimulator can generalize across scenarios and achieve long-horizon complex simulation. Inspired by human cognition processes, it employs a "consider-decide-capture-transfer" methodology, termed Chain of Behavior Simulation, which excels at analyzing action feasibility and state transitions. Additionally, BeSimulator incorporates code-driven reasoning to enable arithmetic operations and enhance reliability, as well as integrates reflective feedback to refine simulation. Based on our manually constructed behavior-tree-based simulation benchmark BTSIMBENCH, our experiments show a significant performance improvement in behavior simulation compared to baselines, ranging from 14.7% to 26.6%.
An Outline of Prognostics and Health Management Large Model: Concepts, Paradigms, and Challenges
Jul 01, 2024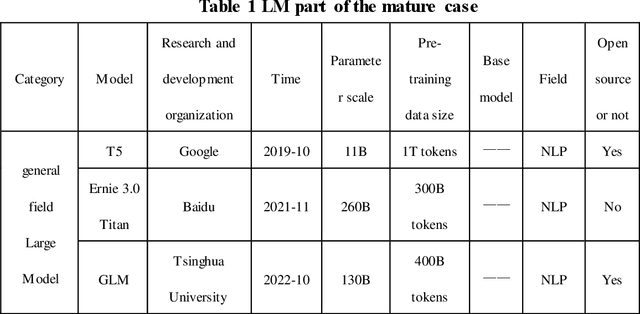
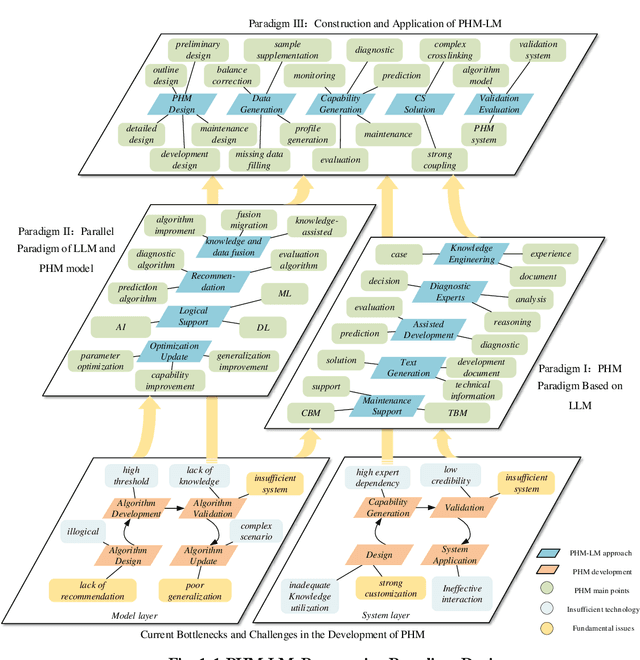
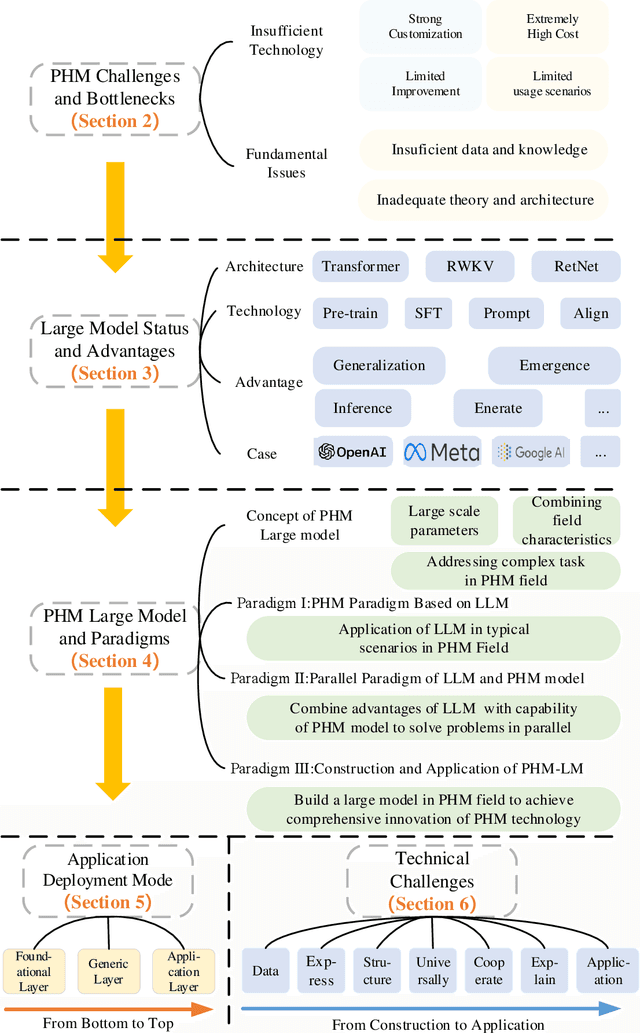
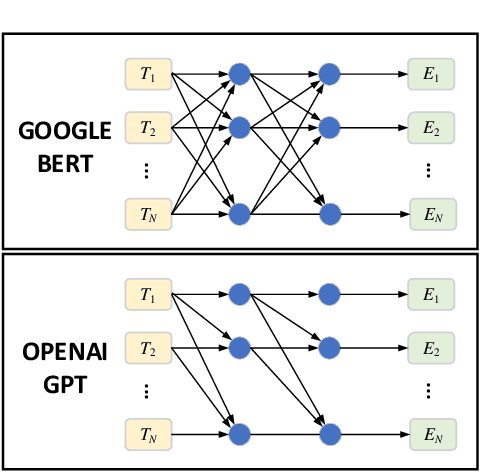
Prognosis and Health Management (PHM), critical for ensuring task completion by complex systems and preventing unexpected failures, is widely adopted in aerospace, manufacturing, maritime, rail, energy, etc. However, PHM's development is constrained by bottlenecks like generalization, interpretation and verification abilities. Presently, generative artificial intelligence (AI), represented by Large Model, heralds a technological revolution with the potential to fundamentally reshape traditional technological fields and human production methods. Its capabilities, including strong generalization, reasoning, and generative attributes, present opportunities to address PHM's bottlenecks. To this end, based on a systematic analysis of the current challenges and bottlenecks in PHM, as well as the research status and advantages of Large Model, we propose a novel concept and three progressive paradigms of Prognosis and Health Management Large Model (PHM-LM) through the integration of the Large Model with PHM. Subsequently, we provide feasible technical approaches for PHM-LM to bolster PHM's core capabilities within the framework of the three paradigms. Moreover, to address core issues confronting PHM, we discuss a series of technical challenges of PHM-LM throughout the entire process of construction and application. This comprehensive effort offers a holistic PHM-LM technical framework, and provides avenues for new PHM technologies, methodologies, tools, platforms and applications, which also potentially innovates design, research & development, verification and application mode of PHM. And furthermore, a new generation of PHM with AI will also capably be realized, i.e., from custom to generalized, from discriminative to generative, and from theoretical conditions to practical applications.
A Study on Training and Developing Large Language Models for Behavior Tree Generation
Jan 16, 2024This paper presents an innovative exploration of the application potential of large language models (LLM) in addressing the challenging task of automatically generating behavior trees (BTs) for complex tasks. The conventional manual BT generation method is inefficient and heavily reliant on domain expertise. On the other hand, existing automatic BT generation technologies encounter bottlenecks related to task complexity, model adaptability, and reliability. In order to overcome these challenges, we propose a novel methodology that leverages the robust representation and reasoning abilities of LLMs. The core contribution of this paper lies in the design of a BT generation framework based on LLM, which encompasses the entire process, from data synthesis and model training to application developing and data verification. Synthetic data is introduced to train the BT generation model (BTGen model), enhancing its understanding and adaptability to various complex tasks, thereby significantly improving its overall performance. In order to ensure the effectiveness and executability of the generated BTs, we emphasize the importance of data verification and introduce a multilevel verification strategy. Additionally, we explore a range of agent design and development schemes with LLM as the central element. We hope that the work in this paper may provide a reference for the researchers who are interested in BT generation based on LLMs.
Joint Communication-Motion Planning in Wireless-Connected Robotic Networks: Overview and Design Guidelines
Nov 07, 2015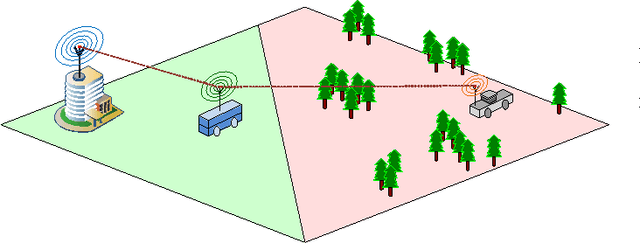
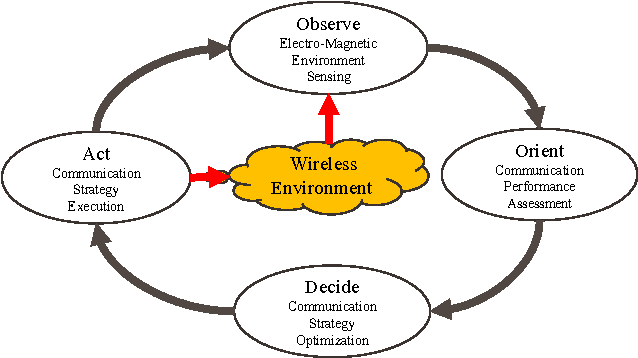
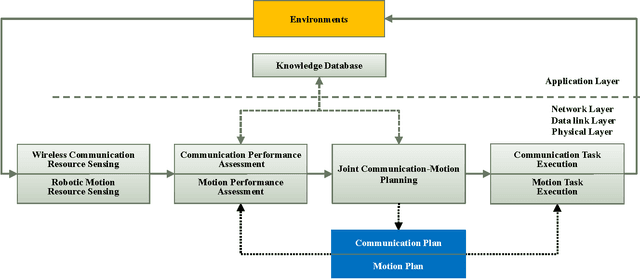
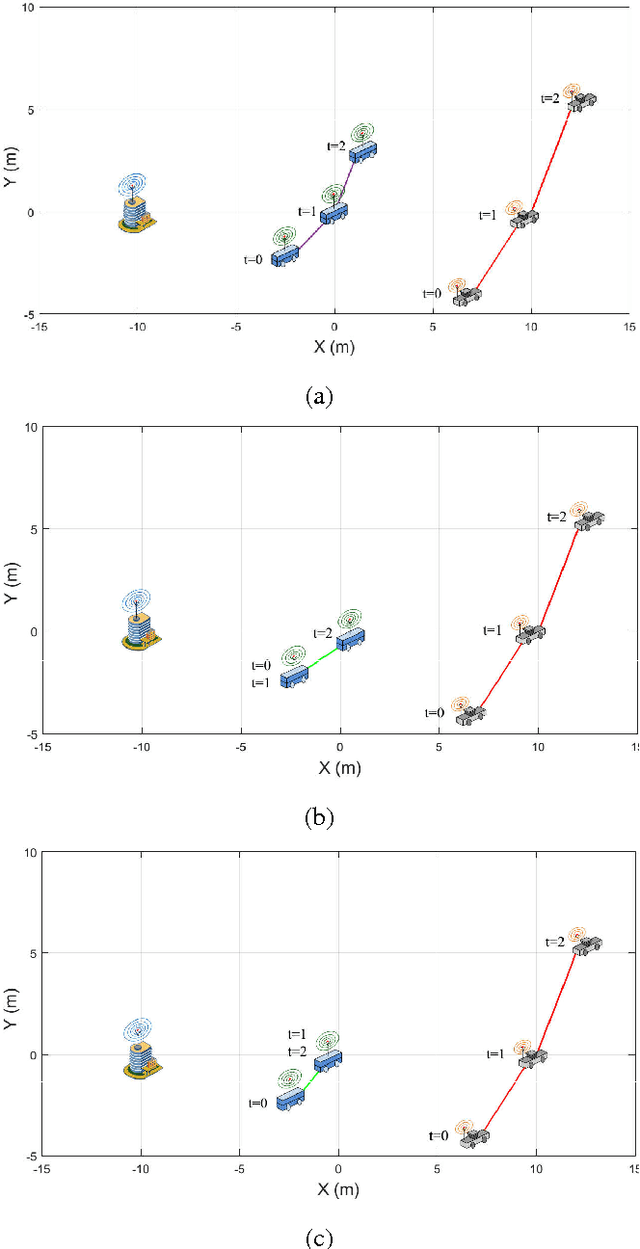
Recent years have witnessed the prosperity of robots and in order to support consensus and cooperation for multi-robot system, wireless communications and networking among robots and the infrastructure have become indispensable. In this technical note, we first provide an overview of the research contributions on communication-aware motion planning (CAMP) in designing wireless-connected robotic networks (WCRNs), where the degree-of-freedom (DoF) provided by motion and communication capabilities embraced by the robots have not been fully exploited. Therefore, we propose the framework of joint communication-motion planning (JCMP) as well as the architecture for incorporating JCMP in WCRNs. The proposed architecture is motivated by the observe-orient-decision-action (OODA) model commonly adopted in robotic motion control and cognitive radio. Then, we provide an overview of the orient module that quantify the connectivity assessment. Afterwards, we highlight the JCMP module and compare it with the conventional communication-planning, where the necessity of the JCMP is validated via both theoretical analysis and simulation results of an illustrative example. Finally, a series of open problems are discussed, which picture the gap between the state-of-the-art and a practical WCRN.