 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Communication-Motion Planning in Wireless-Connected Robotic Networks: Overview and Design Guidelines
Paper and Code
Nov 07, 2015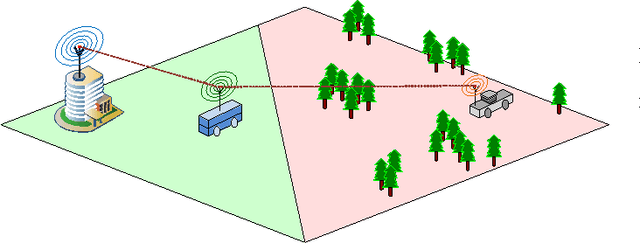
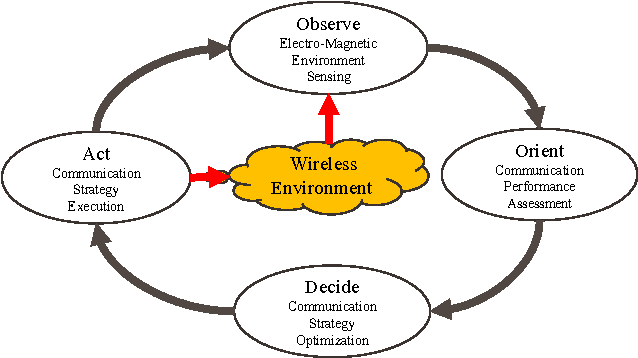
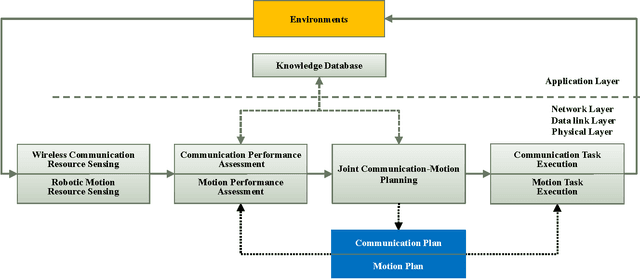
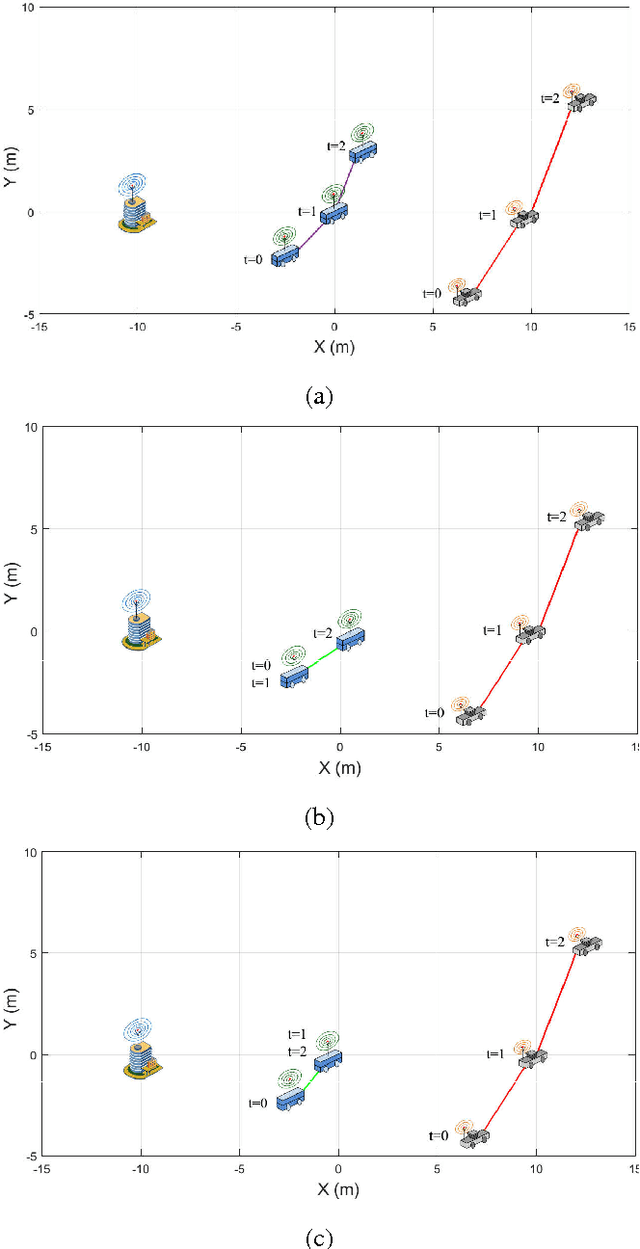
Recent years have witnessed the prosperity of robots and in order to support consensus and cooperation for multi-robot system, wireless communications and networking among robots and the infrastructure have become indispensable. In this technical note, we first provide an overview of the research contributions on communication-aware motion planning (CAMP) in designing wireless-connected robotic networks (WCRNs), where the degree-of-freedom (DoF) provided by motion and communication capabilities embraced by the robots have not been fully exploited. Therefore, we propose the framework of joint communication-motion planning (JCMP) as well as the architecture for incorporating JCMP in WCRNs. The proposed architecture is motivated by the observe-orient-decision-action (OODA) model commonly adopted in robotic motion control and cognitive radio. Then, we provide an overview of the orient module that quantify the connectivity assessment. Afterwards, we highlight the JCMP module and compare it with the conventional communication-planning, where the necessity of the JCMP is validated via both theoretical analysis and simulation results of an illustrative example. Finally, a series of open problems are discussed, which picture the gap between the state-of-the-art and a practical WCRN.