 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-Enhanced Multi-Modal Spiking Neural Network for Dynamic Obstacle Avoidance
Oct 03, 2023Autonomous obstacle avoidance is of vital importance for an intelligent agent such as a mobile robot to navigate in its environment. Existing state-of-the-art methods train a spiking neural network (SNN) with deep reinforcement learning (DRL) to achieve energy-efficient and fast inference speed in complex/unknown scenes. These methods typically assume that the environment is static while the obstacles in real-world scenes are often dynamic. The movement of obstacles increases the complexity of the environment and poses a great challenge to the existing methods. In this work, we approach robust dynamic obstacle avoidance twofold. First, we introduce the neuromorphic vision sensor (i.e., event camera) to provide motion cues complementary to the traditional Laser depth data for handling dynamic obstacles. Second, we develop an DRL-based event-enhanced multimodal spiking actor network (EEM-SAN) that extracts information from motion events data via unsupervised representation learning and fuses Laser and event camera data with learnable thresholding. Experiments demonstrate that our EEM-SAN outperforms state-of-the-art obstacle avoidance methods by a significant margin, especially for dynamic obstacle avoidance.
Biologically Inspired Dynamic Thresholds for Spiking Neural Networks
Jun 09, 2022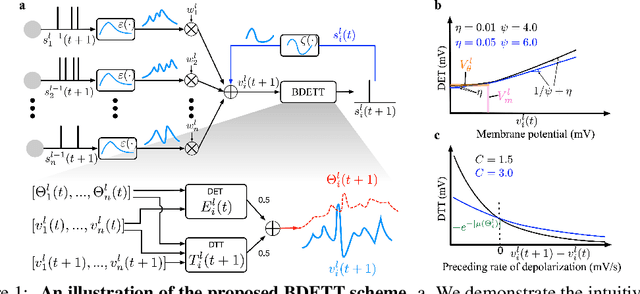
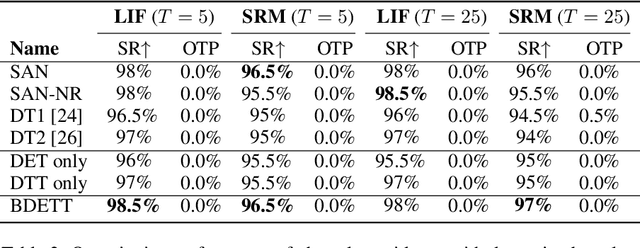
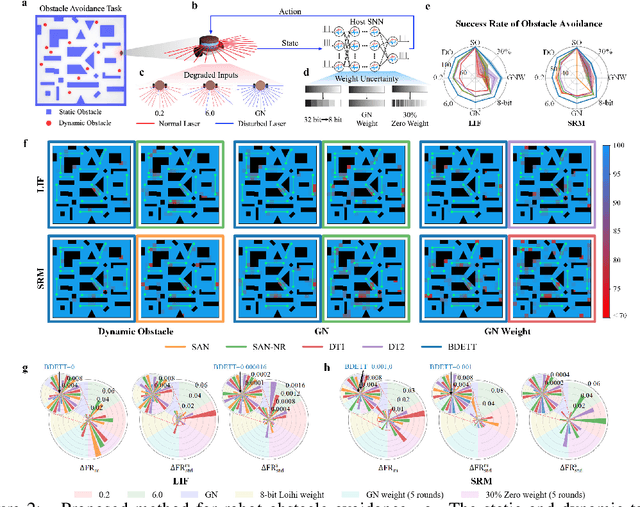
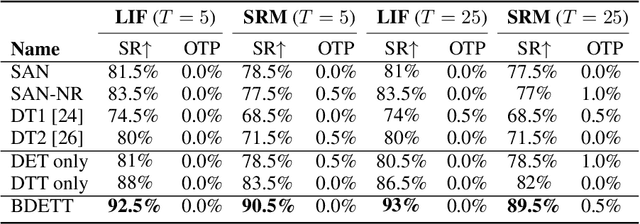
The dynamic membrane potential threshold, as one of the essential properties of a biological neuron, is a spontaneous regulation mechanism that maintains neuronal homeostasis, i.e., the constant overall spiking firing rate of a neuron. As such, the neuron firing rate is regulated by a dynamic spiking threshold, which has been extensively studied in biology. Existing work in the machine learning community does not employ bioplausible spiking threshold schemes. This work aims at bridging this gap by introducing a novel bioinspired dynamic energy-temporal threshold (BDETT) scheme for spiking neural networks (SNNs). The proposed BDETT scheme mirrors two bioplausible observations: a dynamic threshold has 1) a positive correlation with the average membrane potential and 2) a negative correlation with the preceding rate of depolarization. We validate the effectiveness of the proposed BDETT on robot obstacle avoidance and continuous control tasks under both normal conditions and various degraded conditions, including noisy observations, weights, and dynamic environments. We find that the BDETT outperforms existing static and heuristic threshold approaches by significant margins in all tested conditions, and we confirm that the proposed bioinspired dynamic threshold scheme offers bioplausible homeostasis to SNNs in complex real-world tasks.