 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiologically Inspired Dynamic Thresholds for Spiking Neural Networks
Jun 09, 2022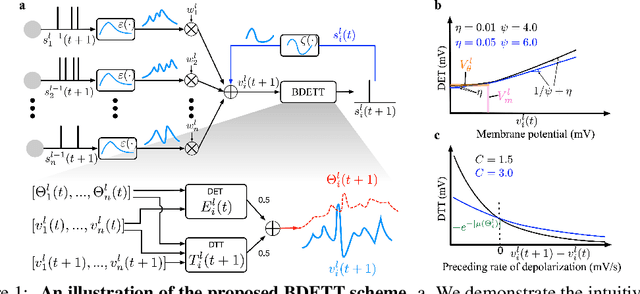
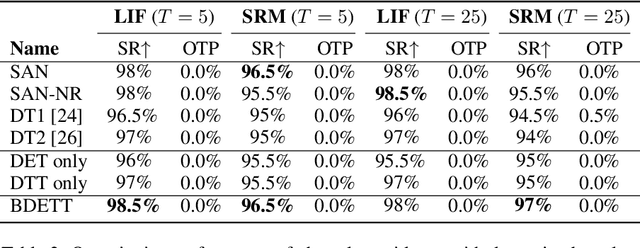
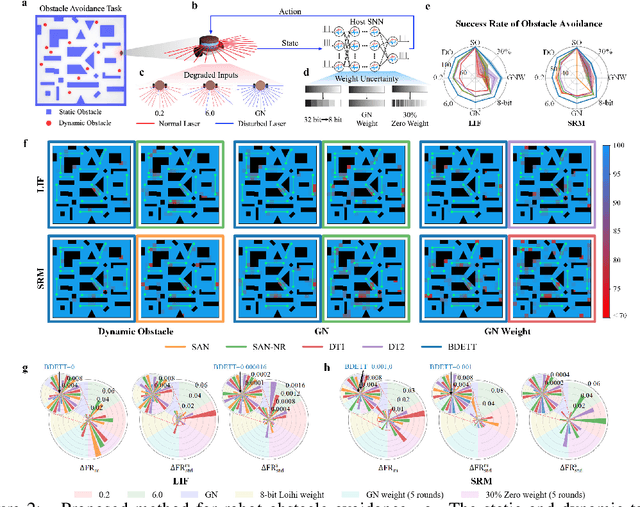
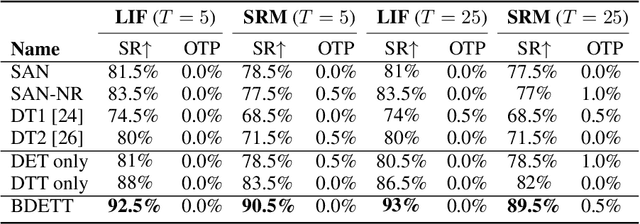
The dynamic membrane potential threshold, as one of the essential properties of a biological neuron, is a spontaneous regulation mechanism that maintains neuronal homeostasis, i.e., the constant overall spiking firing rate of a neuron. As such, the neuron firing rate is regulated by a dynamic spiking threshold, which has been extensively studied in biology. Existing work in the machine learning community does not employ bioplausible spiking threshold schemes. This work aims at bridging this gap by introducing a novel bioinspired dynamic energy-temporal threshold (BDETT) scheme for spiking neural networks (SNNs). The proposed BDETT scheme mirrors two bioplausible observations: a dynamic threshold has 1) a positive correlation with the average membrane potential and 2) a negative correlation with the preceding rate of depolarization. We validate the effectiveness of the proposed BDETT on robot obstacle avoidance and continuous control tasks under both normal conditions and various degraded conditions, including noisy observations, weights, and dynamic environments. We find that the BDETT outperforms existing static and heuristic threshold approaches by significant margins in all tested conditions, and we confirm that the proposed bioinspired dynamic threshold scheme offers bioplausible homeostasis to SNNs in complex real-world tasks.
A Vision-based Irregular Obstacle Avoidance Framework via Deep Reinforcement Learning
Aug 23, 2021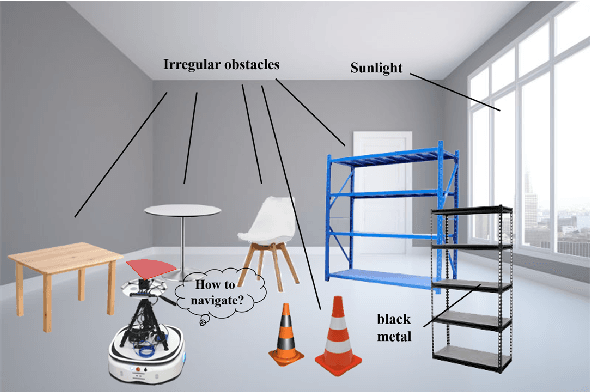
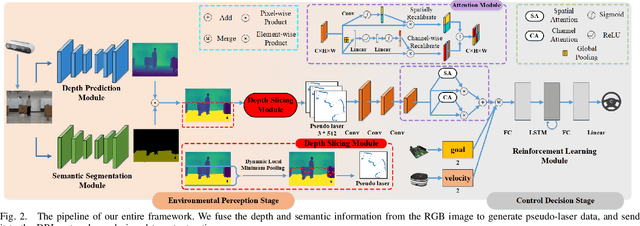
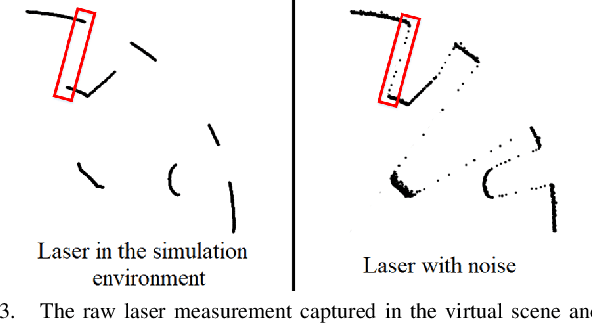
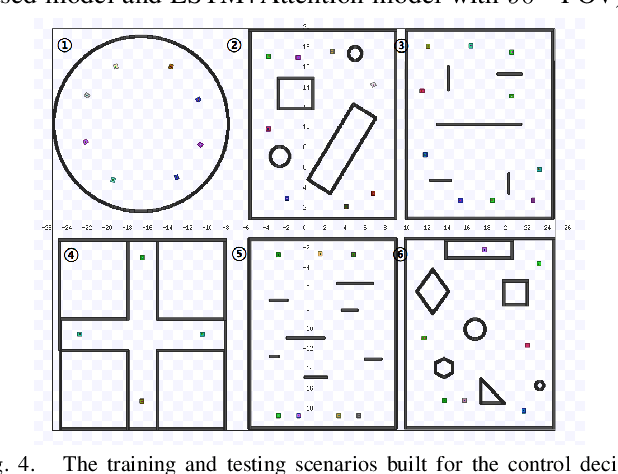
Deep reinforcement learning has achieved great success in laser-based collision avoidance work because the laser can sense accurate depth information without too much redundant data, which can maintain the robustness of the algorithm when it is migrated from the simulation environment to the real world. However, high-cost laser devices are not only difficult to apply on a large scale but also have poor robustness to irregular objects, e.g., tables, chairs, shelves, etc. In this paper, we propose a vision-based collision avoidance framework to solve the challenging problem. Our method attempts to estimate the depth and incorporate the semantic information from RGB data to obtain a new form of data, pseudo-laser data, which combines the advantages of visual information and laser information. Compared to traditional laser data that only contains the one-dimensional distance information captured at a certain height, our proposed pseudo-laser data encodes the depth information and semantic information within the image, which makes our method more effective for irregular obstacles. Besides, we adaptively add noise to the laser data during the training stage to increase the robustness of our model in the real world, due to the estimated depth information is not accurate. Experimental results show that our framework achieves state-of-the-art performance in several unseen virtual and real-world scenarios.