 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovel Online-Offline MA2C-DDPG for Efficient Spectrum Allocation and Trajectory Optimization in Dynamic Spectrum Sharing UAV Networks
Aug 04, 2023



Unmanned aerial vehicle (UAV) communication is of crucial importance for diverse practical applications. However, it is susceptible to the severe spectrum scarcity problem and interference since it operates in the unlicensed spectrum band. In order to tackle those issues, a dynamic spectrum sharing network is considered with the anti-jamming technique. Moreover, an intelligent spectrum allocation and trajectory optimization scheme is proposed to adapt to diverse jamming models by exploiting our designed novel online-offline multi-agent actor-critic and deep deterministic policy-gradient framework. Simulation results demonstrate the high efficiency of our proposed framework. It is also shown that our proposed scheme achieves the largest transmission rate among all benchmark schemes.
A Survey on Collaborative DNN Inference for Edge Intelligence
Jul 16, 2022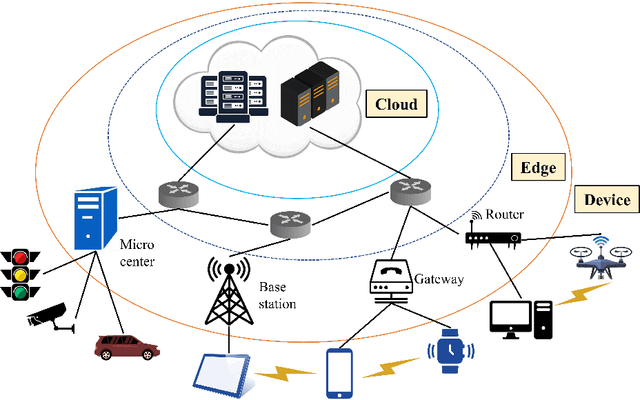
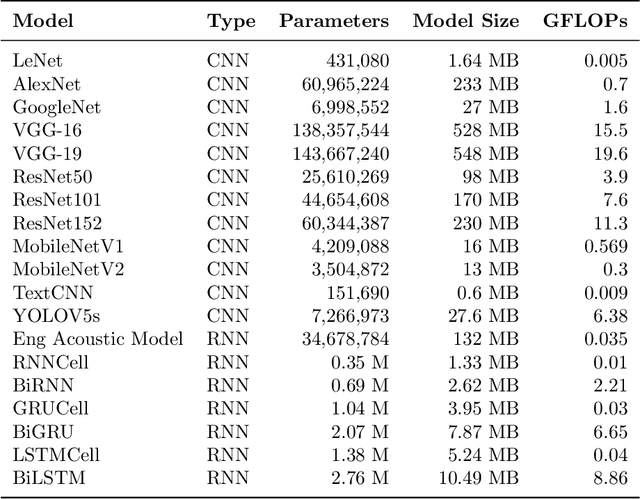
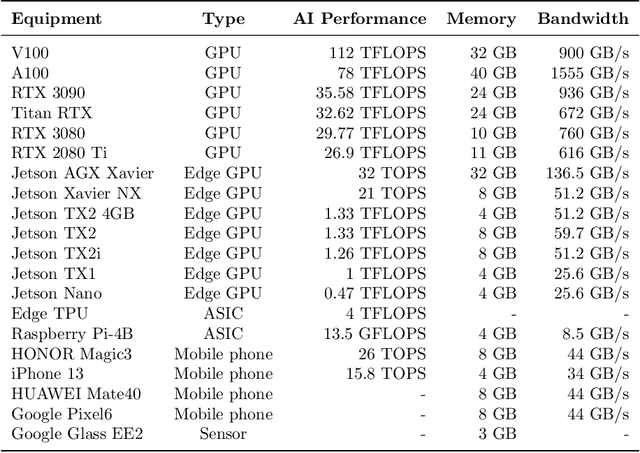
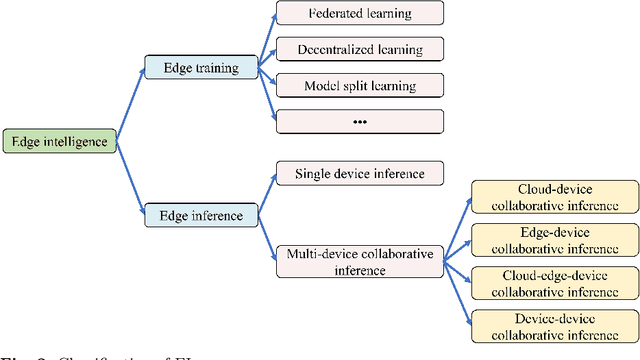
With the vigorous development of artificial intelligence (AI), the intelligent applications based on deep neural network (DNN) change people's lifestyles and the production efficiency. However, the huge amount of computation and data generated from the network edge becomes the major bottleneck, and traditional cloud-based computing mode has been unable to meet the requirements of real-time processing tasks. To solve the above problems, by embedding AI model training and inference capabilities into the network edge, edge intelligence (EI) becomes a cutting-edge direction in the field of AI. Furthermore, collaborative DNN inference among the cloud, edge, and end device provides a promising way to boost the EI. Nevertheless, at present, EI oriented collaborative DNN inference is still in its early stage, lacking a systematic classification and discussion of existing research efforts. Thus motivated, we have made a comprehensive investigation on the recent studies about EI oriented collaborative DNN inference. In this paper, we firstly review the background and motivation of EI. Then, we classify four typical collaborative DNN inference paradigms for EI, and analyze the characteristics and key technologies of them. Finally, we summarize the current challenges of collaborative DNN inference, discuss the future development trend and provide the future research direction.
Serverless Federated Learning for UAV Networks: Architecture, Challenges, and Opportunities
Apr 15, 2021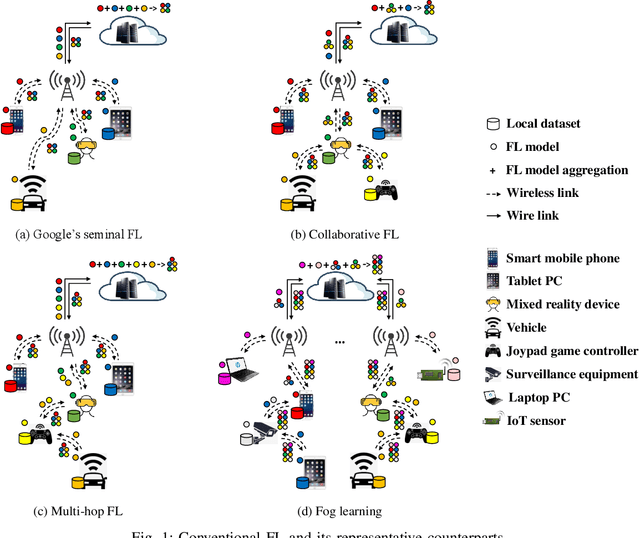
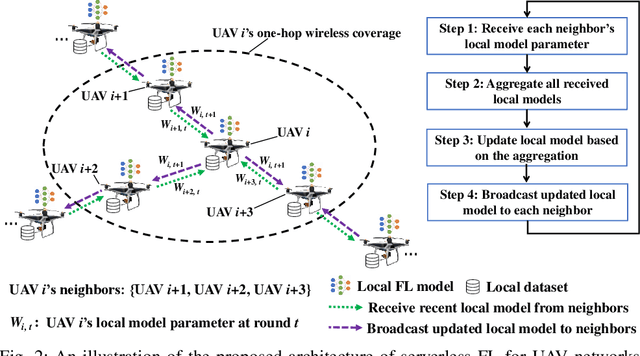
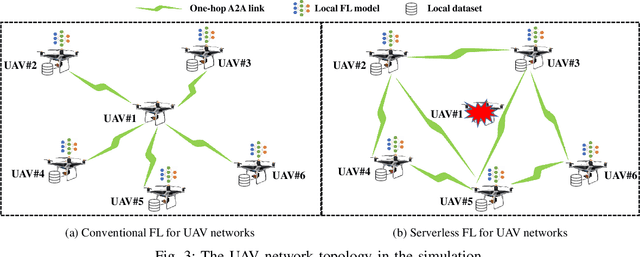
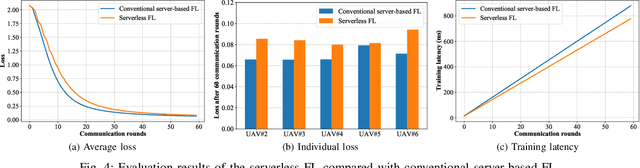
Unmanned aerial vehicles (UAVs), or say drones, are envisioned to support extensive applications in next-generation wireless networks in both civil and military fields. Empowering UAVs networks intelligence by artificial intelligence (AI) especially machine learning (ML) techniques is inevitable and appealing to enable the aforementioned applications. To solve the problems of traditional cloud-centric ML for UAV networks such as privacy concern, unacceptable latency, and resource burden, a distributed ML technique, i.e., federated learning (FL), has been recently proposed to enable multiple UAVs to collaboratively train ML model without letting out raw data. However, almost all existing FL paradigms are server-based, i.e., a central entity is in charge of ML model aggregation and fusion over the whole network, which could result in the issue of a single point of failure and are inappropriate to UAV networks with both unreliable nodes and links. To address the above issue, in this article, we propose a novel architecture called SELF-UN (\underline{SE}rver\underline{L}ess \underline{F}L for \underline{U}AV \underline{N}etworks), which enables FL within UAV networks without a central entity. We also conduct a preliminary simulation study to validate the feasibility and effectiveness of the SELF-UN architecture. Finally, we discuss the main challenges and potential research directions in the SELF-UN.