 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoIRL-AD: Collaborative-Competitive Imitation-Reinforcement Learning in Latent World Models for Autonomous Driving
Oct 14, 2025End-to-end autonomous driving models trained solely with imitation learning (IL) often suffer from poor generalization. In contrast, reinforcement learning (RL) promotes exploration through reward maximization but faces challenges such as sample inefficiency and unstable convergence. A natural solution is to combine IL and RL. Moving beyond the conventional two-stage paradigm (IL pretraining followed by RL fine-tuning), we propose CoIRL-AD, a competitive dual-policy framework that enables IL and RL agents to interact during training. CoIRL-AD introduces a competition-based mechanism that facilitates knowledge exchange while preventing gradient conflicts. Experiments on the nuScenes dataset show an 18% reduction in collision rate compared to baselines, along with stronger generalization and improved performance on long-tail scenarios. Code is available at: https://github.com/SEU-zxj/CoIRL-AD.
Large Language Models Powered Context-aware Motion Prediction
Mar 17, 2024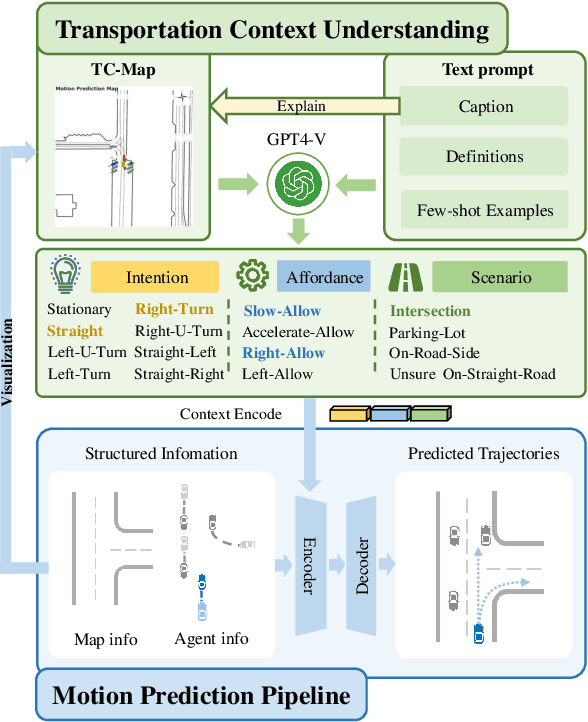
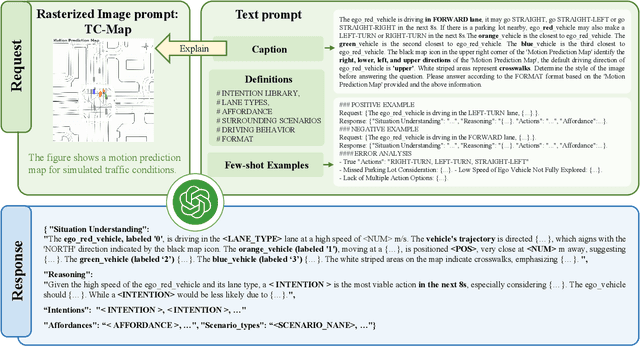
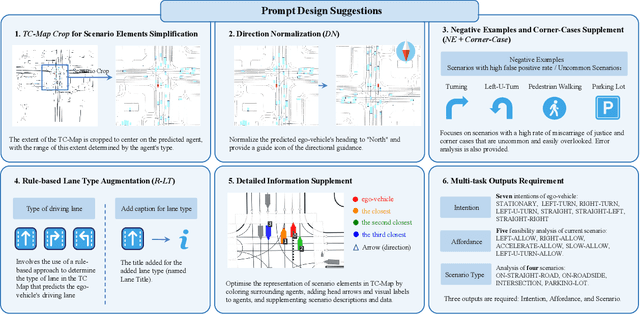
Motion prediction is among the most fundamental tasks in autonomous driving. Traditional methods of motion forecasting primarily encode vector information of maps and historical trajectory data of traffic participants, lacking a comprehensive understanding of overall traffic semantics, which in turn affects the performance of prediction tasks. In this paper, we utilized Large Language Models (LLMs) to enhance the global traffic context understanding for motion prediction tasks. We first conducted systematic prompt engineering, visualizing complex traffic environments and historical trajectory information of traffic participants into image prompts -- Transportation Context Map (TC-Map), accompanied by corresponding text prompts. Through this approach, we obtained rich traffic context information from the LLM. By integrating this information into the motion prediction model, we demonstrate that such context can enhance the accuracy of motion predictions. Furthermore, considering the cost associated with LLMs, we propose a cost-effective deployment strategy: enhancing the accuracy of motion prediction tasks at scale with 0.7\% LLM-augmented datasets. Our research offers valuable insights into enhancing the understanding of traffic scenes of LLMs and the motion prediction performance of autonomous driving.