 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFreeAskWorld: An Interactive and Closed-Loop Simulator for Human-Centric Embodied AI
Nov 17, 2025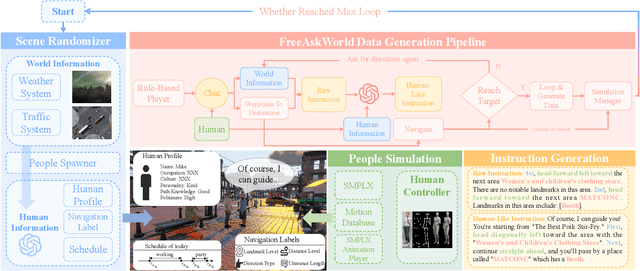
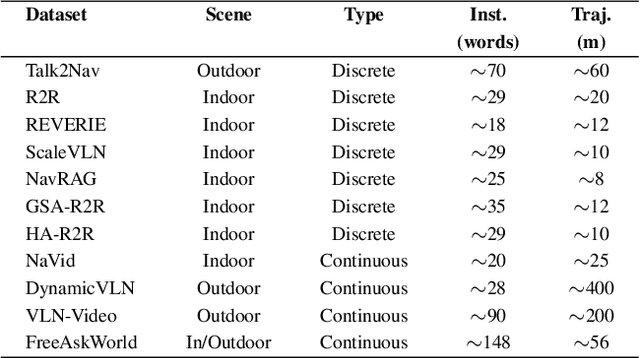
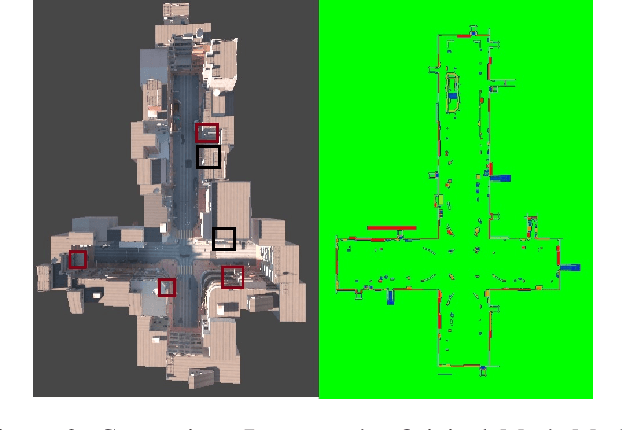
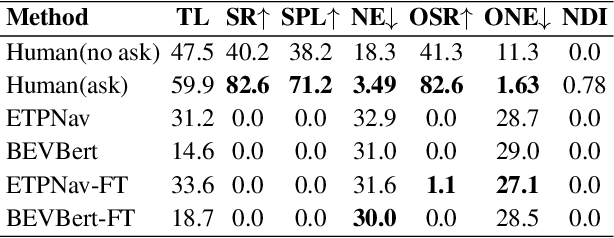
As embodied intelligence emerges as a core frontier in artificial intelligence research, simulation platforms must evolve beyond low-level physical interactions to capture complex, human-centered social behaviors. We introduce FreeAskWorld, an interactive simulation framework that integrates large language models (LLMs) for high-level behavior planning and semantically grounded interaction, informed by theories of intention and social cognition. Our framework supports scalable, realistic human-agent simulations and includes a modular data generation pipeline tailored for diverse embodied tasks.To validate the framework, we extend the classic Vision-and-Language Navigation (VLN) task into a interaction enriched Direction Inquiry setting, wherein agents can actively seek and interpret navigational guidance. We present and publicly release FreeAskWorld, a large-scale benchmark dataset comprising reconstructed environments, six diverse task types, 16 core object categories, 63,429 annotated sample frames, and more than 17 hours of interaction data to support training and evaluation of embodied AI systems. We benchmark VLN models, and human participants under both open-loop and closed-loop settings. Experimental results demonstrate that models fine-tuned on FreeAskWorld outperform their original counterparts, achieving enhanced semantic understanding and interaction competency. These findings underscore the efficacy of socially grounded simulation frameworks in advancing embodied AI systems toward sophisticated high-level planning and more naturalistic human-agent interaction. Importantly, our work underscores that interaction itself serves as an additional information modality.
* 9 pages, 4 figures
CoIRL-AD: Collaborative-Competitive Imitation-Reinforcement Learning in Latent World Models for Autonomous Driving
Oct 14, 2025End-to-end autonomous driving models trained solely with imitation learning (IL) often suffer from poor generalization. In contrast, reinforcement learning (RL) promotes exploration through reward maximization but faces challenges such as sample inefficiency and unstable convergence. A natural solution is to combine IL and RL. Moving beyond the conventional two-stage paradigm (IL pretraining followed by RL fine-tuning), we propose CoIRL-AD, a competitive dual-policy framework that enables IL and RL agents to interact during training. CoIRL-AD introduces a competition-based mechanism that facilitates knowledge exchange while preventing gradient conflicts. Experiments on the nuScenes dataset show an 18% reduction in collision rate compared to baselines, along with stronger generalization and improved performance on long-tail scenarios. Code is available at: https://github.com/SEU-zxj/CoIRL-AD.
Bench2FreeAD: A Benchmark for Vision-based End-to-end Navigation in Unstructured Robotic Environments
Mar 15, 2025Most current end-to-end (E2E) autonomous driving algorithms are built on standard vehicles in structured transportation scenarios, lacking exploration of robot navigation for unstructured scenarios such as auxiliary roads, campus roads, and indoor settings. This paper investigates E2E robot navigation in unstructured road environments. First, we introduce two data collection pipelines - one for real-world robot data and another for synthetic data generated using the Isaac Sim simulator, which together produce an unstructured robotics navigation dataset -- FreeWorld Dataset. Second, we fine-tuned an efficient E2E autonomous driving model -- VAD -- using our datasets to validate the performance and adaptability of E2E autonomous driving models in these environments. Results demonstrate that fine-tuning through our datasets significantly enhances the navigation potential of E2E autonomous driving models in unstructured robotic environments. Thus, this paper presents the first dataset targeting E2E robot navigation tasks in unstructured scenarios, and provides a benchmark based on vision-based E2E autonomous driving algorithms to facilitate the development of E2E navigation technology for logistics and service robots. The project is available on Github.