 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Supported Platform for System Monitoring and Decision-Making in Nuclear Waste Management with Large Language Models
May 27, 2025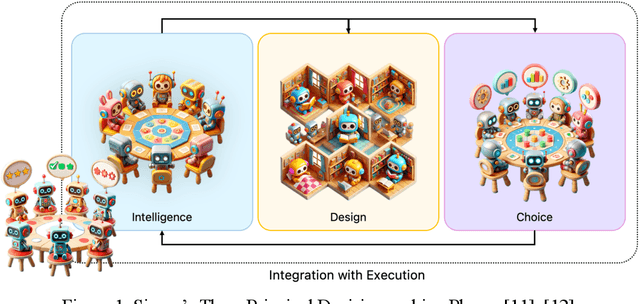
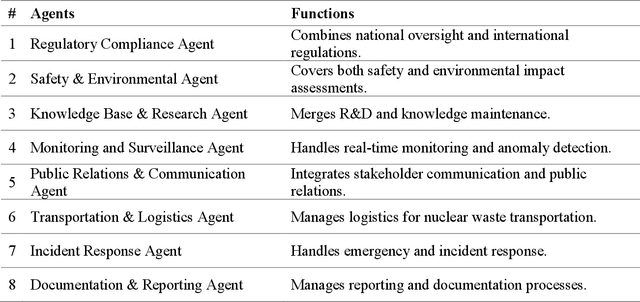
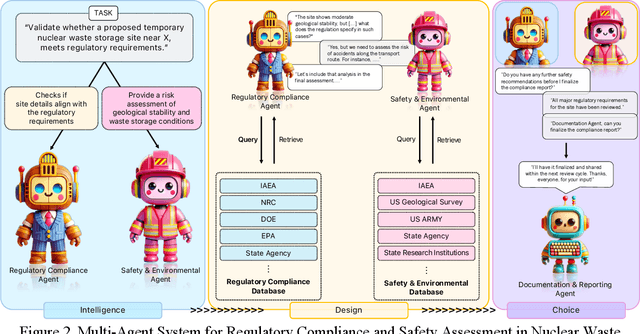
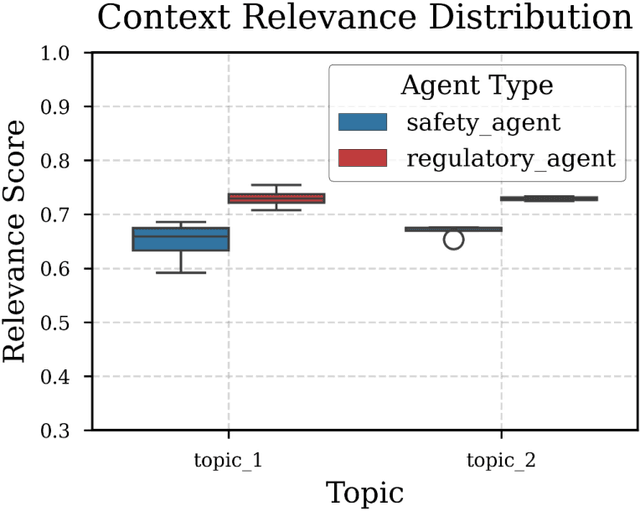
Nuclear waste management requires rigorous regulatory compliance assessment, demanding advanced decision-support systems capable of addressing complex legal, environmental, and safety considerations. This paper presents a multi-agent Retrieval-Augmented Generation (RAG) system that integrates large language models (LLMs) with document retrieval mechanisms to enhance decision accuracy through structured agent collaboration. Through a structured 10-round discussion model, agents collaborate to assess regulatory compliance and safety requirements while maintaining document-grounded responses. Implemented on consumer-grade hardware, the system leverages Llama 3.2 and mxbai-embed-large-v1 embeddings for efficient retrieval and semantic representation. A case study of a proposed temporary nuclear waste storage site near Winslow, Arizona, demonstrates the framework's effectiveness. Results show the Regulatory Agent achieves consistently higher relevance scores in maintaining alignment with legal frameworks, while the Safety Agent effectively manages complex risk assessments requiring multifaceted analysis. The system demonstrates progressive improvement in agreement rates between agents across discussion rounds while semantic drift decreases, indicating enhanced decision-making consistency and response coherence. The system ensures regulatory decisions remain factually grounded, dynamically adapting to evolving regulatory frameworks through real-time document retrieval. By balancing automated assessment with human oversight, this framework offers a scalable and transparent approach to regulatory governance. These findings underscore the potential of AI-driven, multi-agent systems in advancing evidence-based, accountable, and adaptive decision-making for high-stakes environmental management scenarios.
Teaching Robots to Handle Nuclear Waste: A Teleoperation-Based Learning Approach<
Apr 02, 2025This paper presents a Learning from Teleoperation (LfT) framework that integrates human expertise with robotic precision to enable robots to autonomously perform skills learned from human operators. The proposed framework addresses challenges in nuclear waste handling tasks, which often involve repetitive and meticulous manipulation operations. By capturing operator movements and manipulation forces during teleoperation, the framework utilizes this data to train machine learning models capable of replicating and generalizing human skills. We validate the effectiveness of the LfT framework through its application to a power plug insertion task, selected as a representative scenario that is repetitive yet requires precise trajectory and force control. Experimental results highlight significant improvements in task efficiency, while reducing reliance on continuous operator involvement.
Contact Tooling Manipulation Control for Robotic Repair Platform
Nov 21, 2024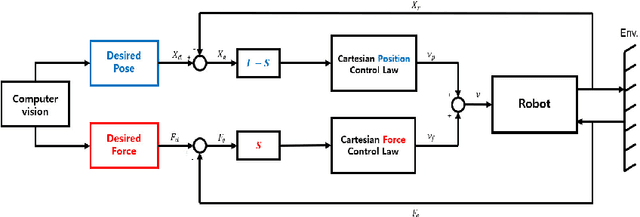
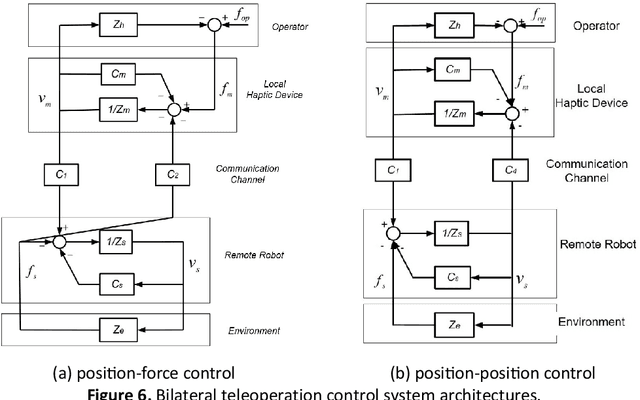
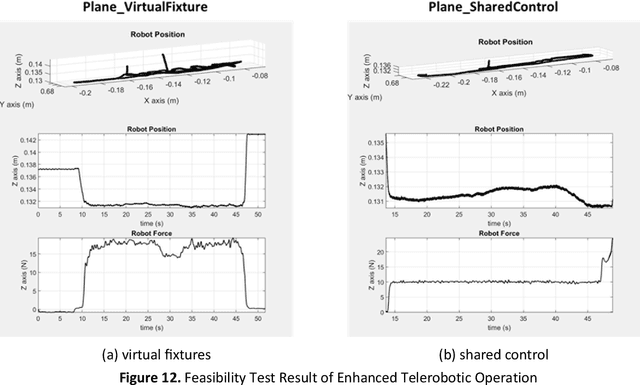
This paper delves into various robotic manipulation control methods designed for dynamic contact tooling operations on a robotic repair platform. The explored control strategies include hybrid position-force control, admittance control, bilateral telerobotic control, virtual fixture, and shared control. Each approach is elucidated and assessed in terms of its applicability and effectiveness for handling contact tooling tasks in real-world repair scenarios. The hybrid position-force controller is highlighted for its proficiency in executing precise force-required tasks, but it demands contingent on an accurate model of the environment and structured, static environment. In contrast, for unstructured environments, bilateral teleoperation control is investigated, revealing that the compliance with the remote robot controller is crucial for stable contact, albeit at the expense of reduced motion tracking performance. Moreover, advanced controllers for tooling manipulation tasks, such as virtual fixture and shared control approaches, are investigated for their potential applications.
Dual-Arm Telerobotic Platform for Robotic Hotbox Operations for Nuclear Waste Disposition in EM Sites
Nov 21, 2024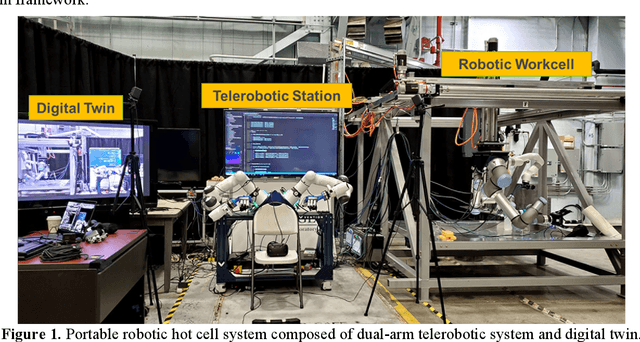
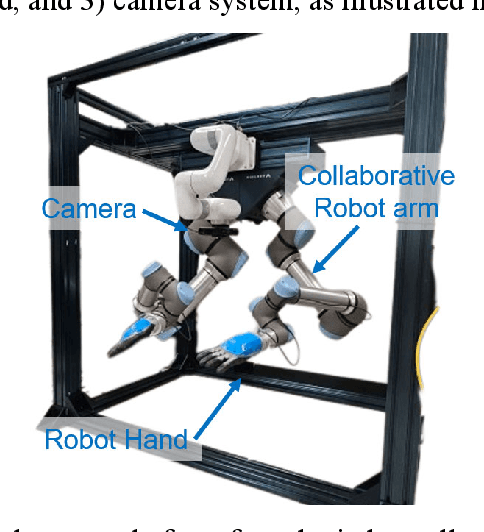
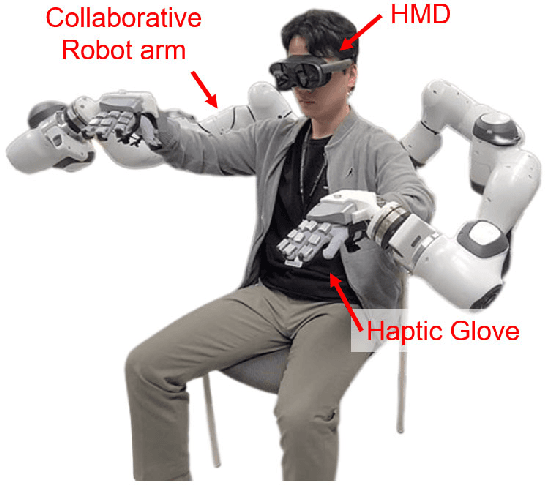
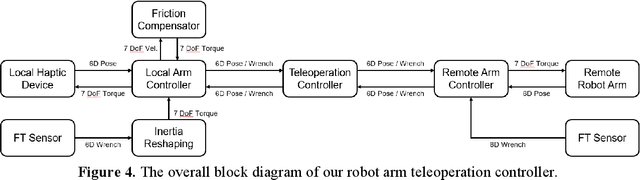
This paper introduces a dual-arm telerobotic platform designed to efficiently and safely execute hot cell operations for nuclear waste disposition at EM sites. The proposed system consists of a remote robot arm platform and a teleoperator station, both integrated with a software architecture to control the entire system. The dual-arm configuration of the remote platform enhances versatility and task performance in complex and hazardous environments, ensuring precise manipulation and effective handling of nuclear waste materials. The integration of a teleoperator station enables human teleoperator to remotely control the entire system real-time, enhancing decision-making capabilities, situational awareness, and dexterity. The control software plays a crucial role in our system, providing a robust and intuitive interface for the teleoperator. Test operation results demonstrate the system's effectiveness in operating as a remote hotbox for nuclear waste disposition, showcasing its potential applicability in real EM sites.
Augmented Reality Remote Operation of Dual Arm Manipulators in Hot Boxes
Mar 28, 2023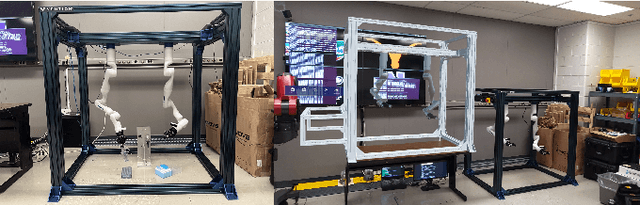
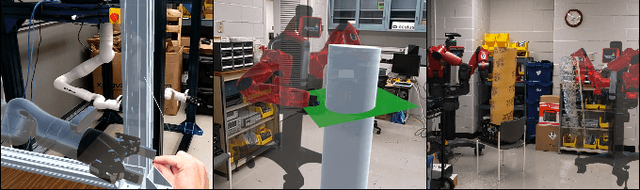
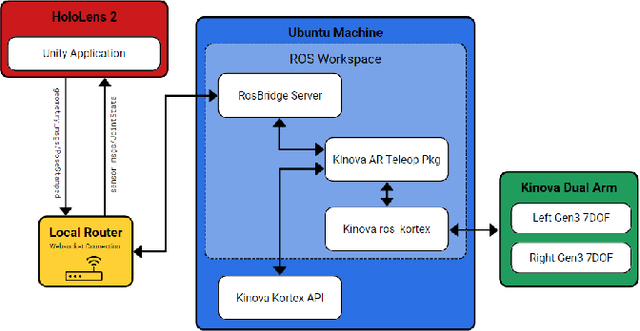
In nuclear isotope and chemistry laboratories, hot cells and gloveboxes provide scientists with a controlled and safe environment to perform experiments. Working on experiments in these isolated containment cells requires scientists to be physically present. For hot cell work today, scientists manipulate equipment and radioactive material inside through a bilateral mechanical control mechanism. Motions produced outside the cell with the master control levers are mechanically transferred to the internal grippers inside the shielded containment cell. There is a growing need to have the capability to conduct experiments within these cells remotely. A simple method to enable remote manipulations within hot cell and glovebox cells is to mount two robotic arms inside a box to mimic the motions of human hands. An AR application was built in this work to allow a user wearing a Microsoft HoloLens 2 headset to teleoperate dual arm manipulators by grasping robotic end-effector digital replicas in AR from a remote location. In addition to the real-time replica of the physical robotic arms in AR, the application enables users to view a live video stream attached to the robotic arms and parse a 3D point cloud of 3D objects in their remote AR environment for better situational awareness. This work also provides users with virtual fixture to assist in manipulation and other teleoperation tasks.
Design and Control of a Quasi-Direct Drive Soft Hybrid Knee Exoskeleton for Injury Prevention during Squatting
Feb 19, 2019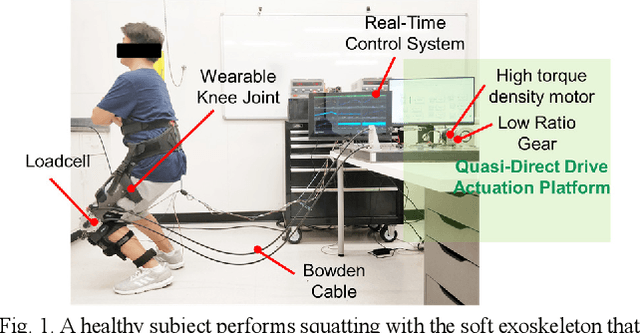
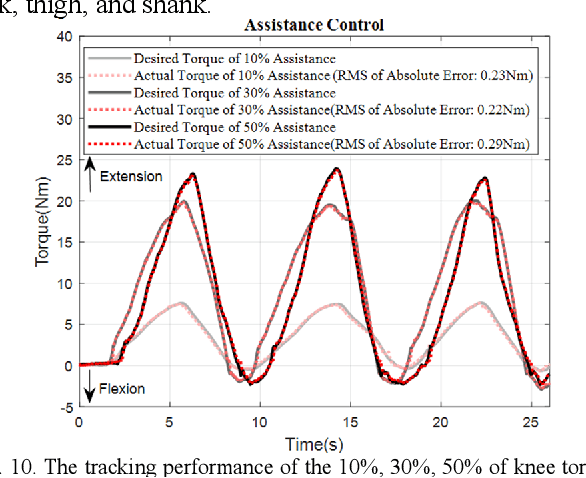
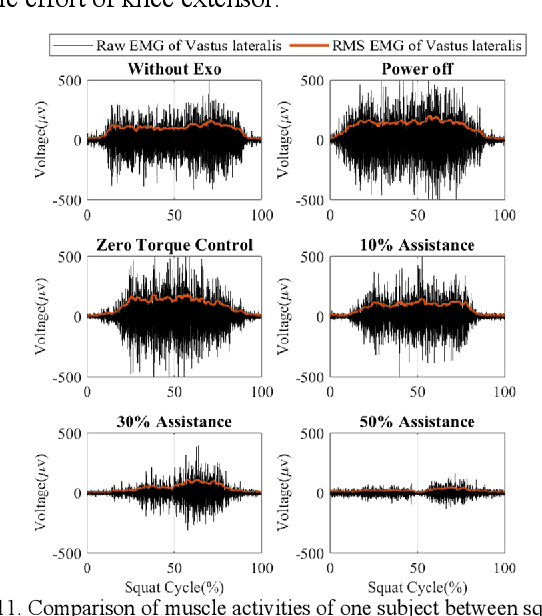
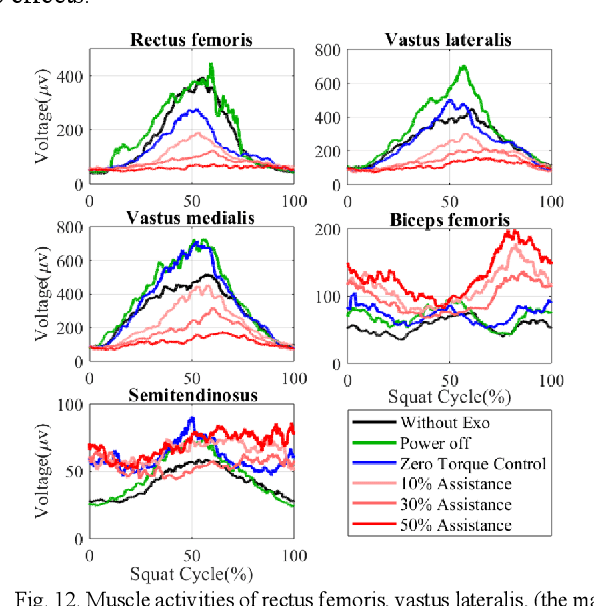
This paper presents a new design approach of wearable robots that tackle the three barriers to mainstay practical use of exoskeletons, namely discomfort, weight of the device, and symbiotic control of the exoskeleton-human co-robot system. The hybrid exoskeleton approach, demonstrated in a soft knee industrial exoskeleton case, mitigates the discomfort of wearers as it aims to avoid the drawbacks of rigid exoskeletons and textile-based soft exosuits. Quasi-direct drive actuation using high-torque density motors minimizes the weight of the device and presents high backdrivability that does not restrict natural movement. We derive a biomechanics model that is generic to both squat and stoop lifting motion. The control algorithm symbiotically detects posture using compact inertial measurement unit (IMU) sensors to generate an assistive profile that is proportional to the biological torque generated from our model. Experimental results demonstrate that the robot exhibits 1.5 Nm torque when it is unpowered and 0.5 Nm torque with zero-torque tracking control. The efficacy of injury prevention is demonstrated with one healthy subject. Root mean square (RMS) error of torque tracking is less than 0.29 Nm (1.21% of 24 Nm peak torque) for 50% assistance of biological torque. Comparing to the squat without exoskeleton, the maximum amplitude of the knee extensor muscle activity (rectus femoris) measured by Electromyography (EMG) sensors is reduced by 30% with 50% assistance of biological torque.
Task scheduling system for UAV operations in indoor environment
Apr 21, 2016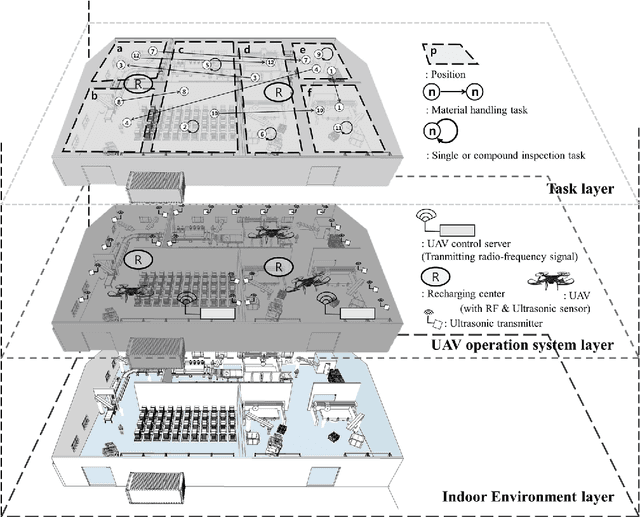

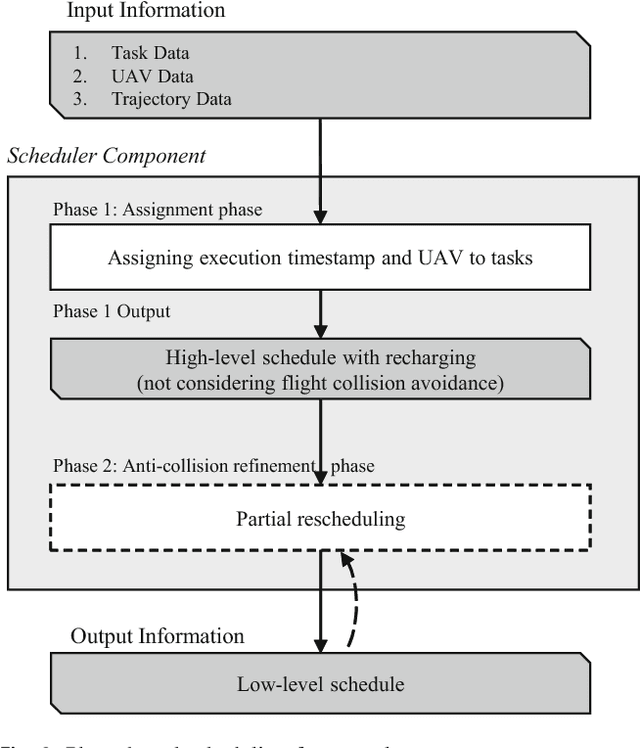
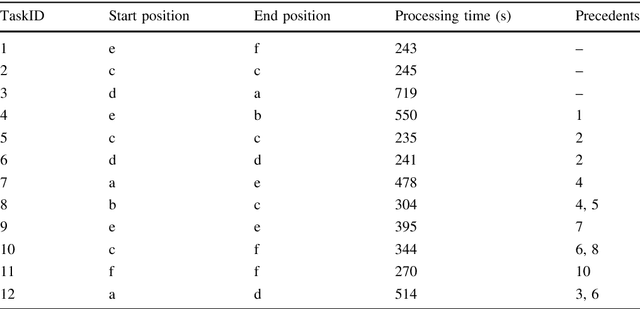
Application of UAV in indoor environment is emerging nowadays due to the advancements in technology. UAV brings more space-flexibility in an occupied or hardly-accessible indoor environment, e.g., shop floor of manufacturing industry, greenhouse, nuclear powerplant. UAV helps in creating an autonomous manufacturing system by executing tasks with less human intervention in time-efficient manner. Consequently, a scheduler is one essential component to be focused on; yet the number of reported studies on UAV scheduling has been minimal. This work proposes a methodology with a heuristic (based on Earliest Available Time algorithm) which assigns tasks to UAVs with an objective of minimizing the makespan. In addition, a quick response towards uncertain events and a quick creation of new high-quality feasible schedule are needed. Hence, the proposed heuristic is incorporated with Particle Swarm Optimization (PSO) algorithm to find a quick near optimal schedule. This proposed methodology is implemented into a scheduler and tested on a few scales of datasets generated based on a real flight demonstration. Performance evaluation of scheduler is discussed in detail and the best solution obtained from a selected set of parameters is reported.