 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPINE Gripper: A Twisted Underactuated Mechanism-based Passive Mode-Transition Gripper
Jan 11, 2026This paper presents a single-actuator passive gripper that achieves both stable grasping and continuous bidirectional in-hand rotation through mechanically encoded power transmission logic. Unlike conventional multifunctional grippers that require multiple actuators, sensors, or control-based switching, the proposed gripper transitions between grasping and rotation solely according to the magnitude of the applied input torque. The key enabler of this behavior is a Twisted Underactuated Mechanism (TUM), which generates non-coplanar motions, namely axial contraction and rotation, from a single rotational input while producing identical contraction regardless of rotation direction. A friction generator mechanically defines torque thresholds that govern passive mode switching, enabling stable grasp establishment before autonomously transitioning to in-hand rotation without sensing or active control. Analytical models describing the kinematics, elastic force generation, and torque transmission of the TUM are derived and experimentally validated. The fabricated gripper is evaluated through quantitative experiments on grasp success, friction-based grasp force regulation, and bidirectional rotation performance. System-level demonstrations, including bolt manipulation, object reorientation, and manipulator-integrated tasks driven solely by wrist torque, confirm reliable grasp to rotate transitions in both rotational directions. These results demonstrate that non-coplanar multifunctional manipulation can be realized through mechanical design alone, establishing mechanically encoded power transmission logic as a robust alternative to actuator and control intensive gripper architectures.
Teaching Robots to Handle Nuclear Waste: A Teleoperation-Based Learning Approach<
Apr 02, 2025This paper presents a Learning from Teleoperation (LfT) framework that integrates human expertise with robotic precision to enable robots to autonomously perform skills learned from human operators. The proposed framework addresses challenges in nuclear waste handling tasks, which often involve repetitive and meticulous manipulation operations. By capturing operator movements and manipulation forces during teleoperation, the framework utilizes this data to train machine learning models capable of replicating and generalizing human skills. We validate the effectiveness of the LfT framework through its application to a power plug insertion task, selected as a representative scenario that is repetitive yet requires precise trajectory and force control. Experimental results highlight significant improvements in task efficiency, while reducing reliance on continuous operator involvement.
Contact Tooling Manipulation Control for Robotic Repair Platform
Nov 21, 2024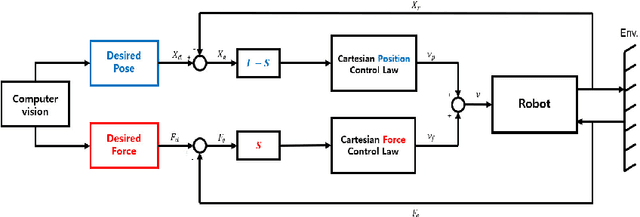
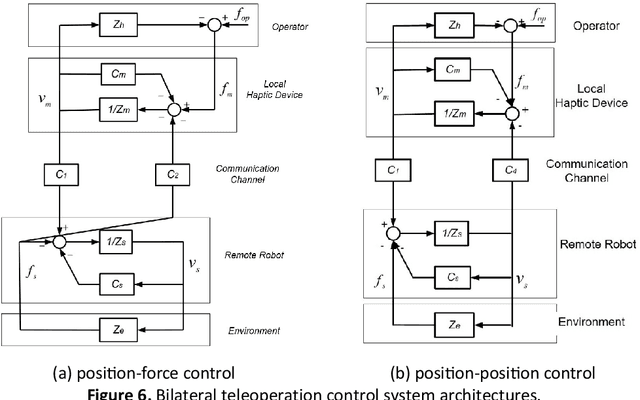
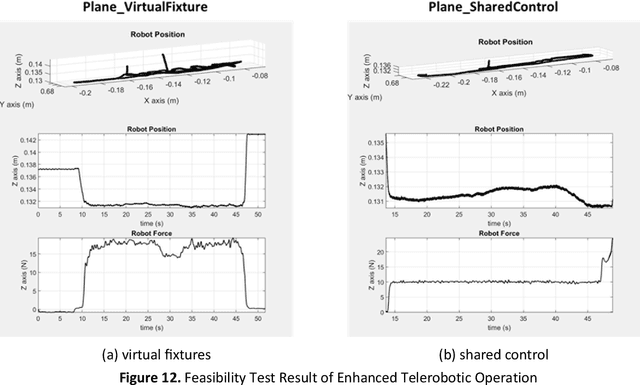
This paper delves into various robotic manipulation control methods designed for dynamic contact tooling operations on a robotic repair platform. The explored control strategies include hybrid position-force control, admittance control, bilateral telerobotic control, virtual fixture, and shared control. Each approach is elucidated and assessed in terms of its applicability and effectiveness for handling contact tooling tasks in real-world repair scenarios. The hybrid position-force controller is highlighted for its proficiency in executing precise force-required tasks, but it demands contingent on an accurate model of the environment and structured, static environment. In contrast, for unstructured environments, bilateral teleoperation control is investigated, revealing that the compliance with the remote robot controller is crucial for stable contact, albeit at the expense of reduced motion tracking performance. Moreover, advanced controllers for tooling manipulation tasks, such as virtual fixture and shared control approaches, are investigated for their potential applications.
Dual-Arm Telerobotic Platform for Robotic Hotbox Operations for Nuclear Waste Disposition in EM Sites
Nov 21, 2024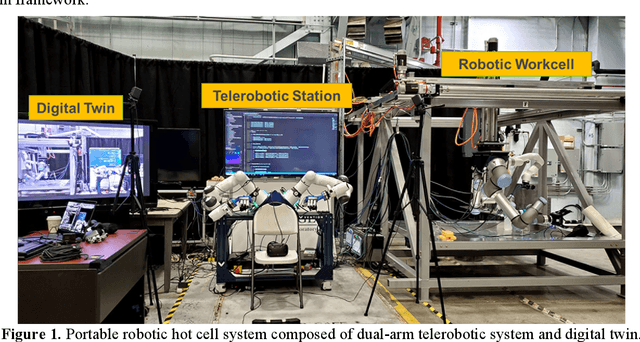
This paper introduces a dual-arm telerobotic platform designed to efficiently and safely execute hot cell operations for nuclear waste disposition at EM sites. The proposed system consists of a remote robot arm platform and a teleoperator station, both integrated with a software architecture to control the entire system. The dual-arm configuration of the remote platform enhances versatility and task performance in complex and hazardous environments, ensuring precise manipulation and effective handling of nuclear waste materials. The integration of a teleoperator station enables human teleoperator to remotely control the entire system real-time, enhancing decision-making capabilities, situational awareness, and dexterity. The control software plays a crucial role in our system, providing a robust and intuitive interface for the teleoperator. Test operation results demonstrate the system's effectiveness in operating as a remote hotbox for nuclear waste disposition, showcasing its potential applicability in real EM sites.
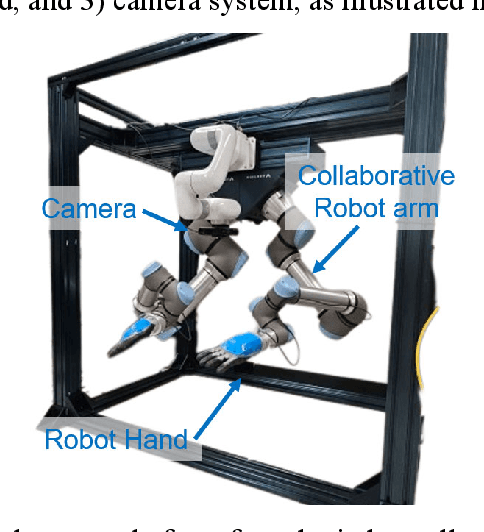
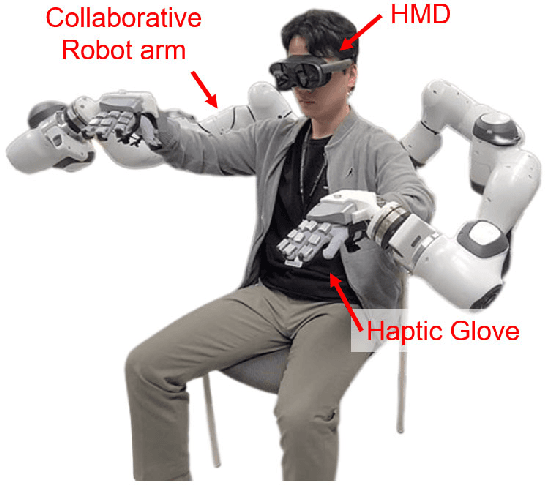
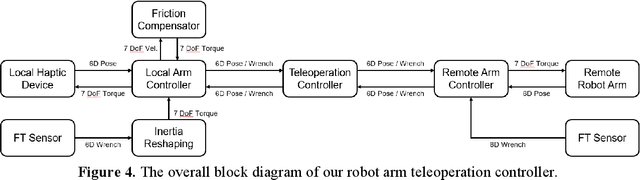
Development of a Collaborative Robotic Arm-based Bimanual Haptic Display
Nov 11, 2024



This paper presents a bimanual haptic display based on collaborative robot arms. We address the limitations of existing robot arm-based haptic displays by optimizing the setup configuration and implementing inertia/friction compensation techniques. The optimized setup configuration maximizes workspace coverage, dexterity, and haptic feedback capability while ensuring collision safety. Inertia/friction compensation significantly improve transparency and reduce user fatigue, leading to a more seamless and transparent interaction. The effectiveness of our system is demonstrated in various applications, including bimanual bilateral teleoperation in both real and simulated environments. This research contributes to the advancement of haptic technology by presenting a practical and effective solution for creating high-performance bimanual haptic displays using collaborative robot arms.