 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollabVLA: Self-Reflective Vision-Language-Action Model Dreaming Together with Human
Sep 18, 2025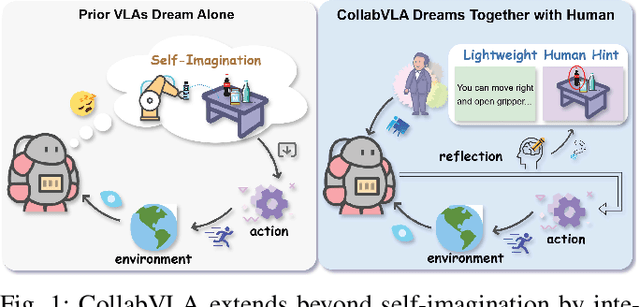
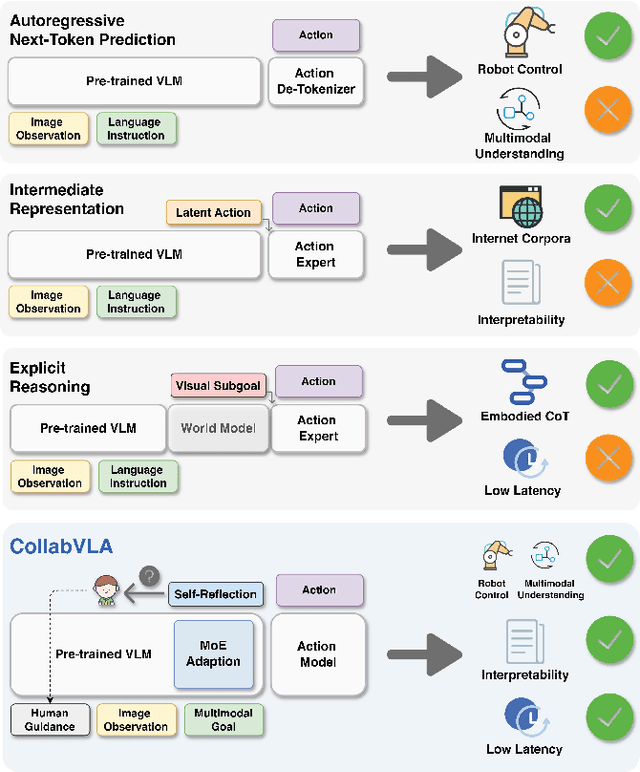
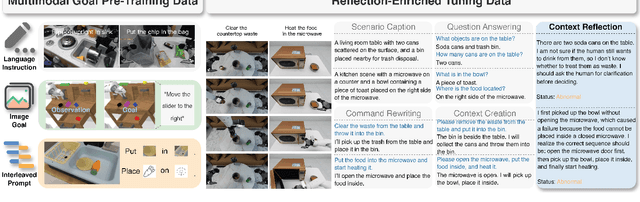
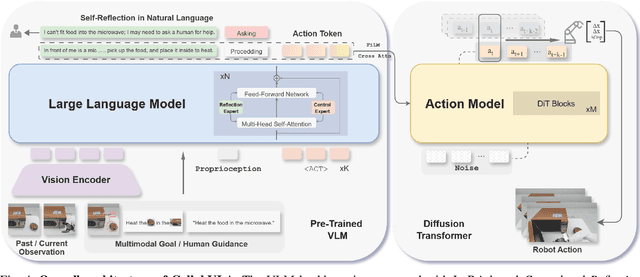
In this work, we present CollabVLA, a self-reflective vision-language-action framework that transforms a standard visuomotor policy into a collaborative assistant. CollabVLA tackles key limitations of prior VLAs, including domain overfitting, non-interpretable reasoning, and the high latency of auxiliary generative models, by integrating VLM-based reflective reasoning with diffusion-based action generation under a mixture-of-experts design. Through a two-stage training recipe of action grounding and reflection tuning, it supports explicit self-reflection and proactively solicits human guidance when confronted with uncertainty or repeated failure. It cuts normalized Time by ~2x and Dream counts by ~4x vs. generative agents, achieving higher success rates, improved interpretability, and balanced low latency compared with existing methods. This work takes a pioneering step toward shifting VLAs from opaque controllers to genuinely assistive agents capable of reasoning, acting, and collaborating with humans.
Knowledge Editing for Large Language Model with Knowledge Neuronal Ensemble
Dec 30, 2024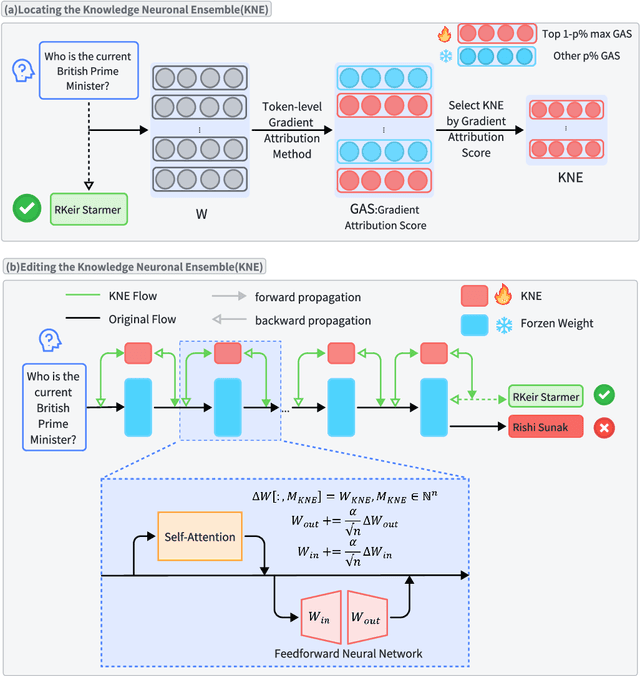
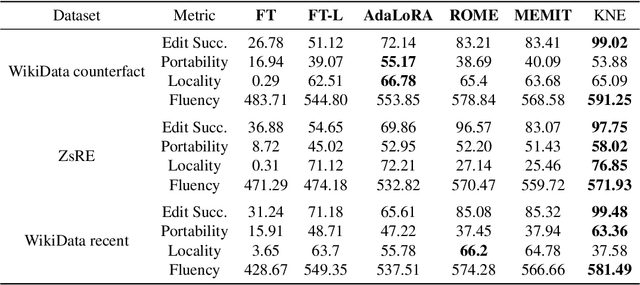
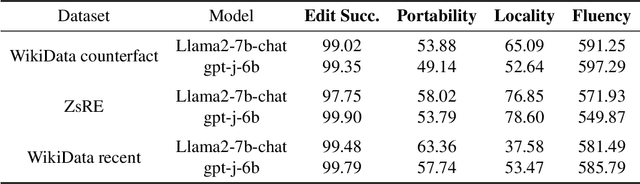
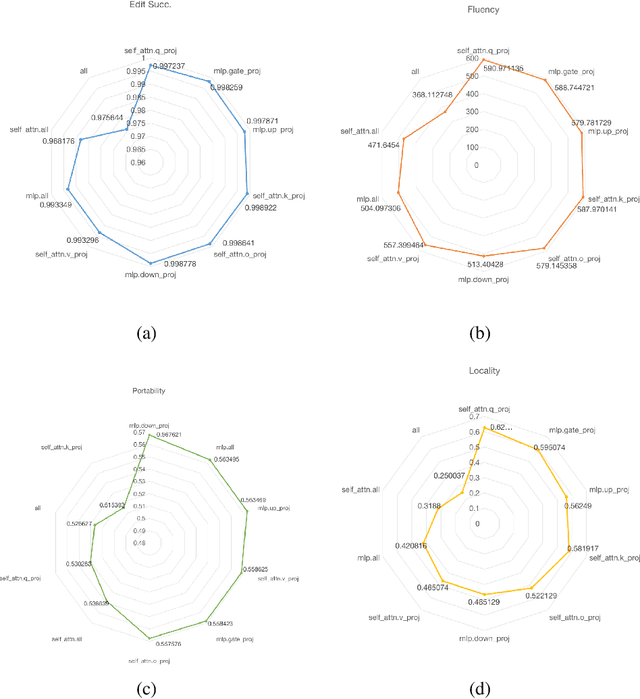
As real-world knowledge is constantly evolving, ensuring the timeliness and accuracy of a model's knowledge is crucial. This has made knowledge editing in large language models increasingly important. However, existing knowledge editing methods face several challenges, including parameter localization coupling, imprecise localization, and a lack of dynamic interaction across layers. In this paper, we propose a novel knowledge editing method called Knowledge Neuronal Ensemble (KNE). A knowledge neuronal ensemble represents a group of neurons encoding specific knowledge, thus mitigating the issue of frequent parameter modification caused by coupling in parameter localization. The KNE method enhances the precision and accuracy of parameter localization by computing gradient attribution scores for each parameter at each layer. During the editing process, only the gradients and losses associated with the knowledge neuronal ensemble are computed, with error backpropagation performed accordingly, ensuring dynamic interaction and collaborative updates among parameters. Experimental results on three widely used knowledge editing datasets show that the KNE method significantly improves the accuracy of knowledge editing and achieves, or even exceeds, the performance of the best baseline methods in portability and locality metrics.
AssistantX: An LLM-Powered Proactive Assistant in Collaborative Human-Populated Environment
Sep 26, 2024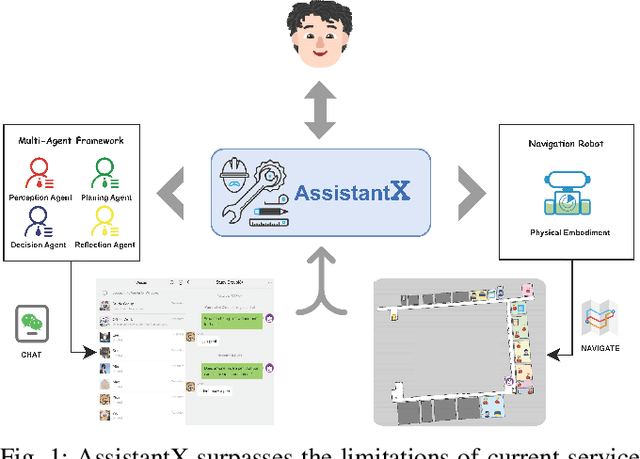
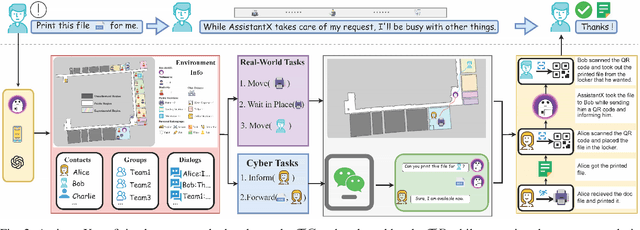
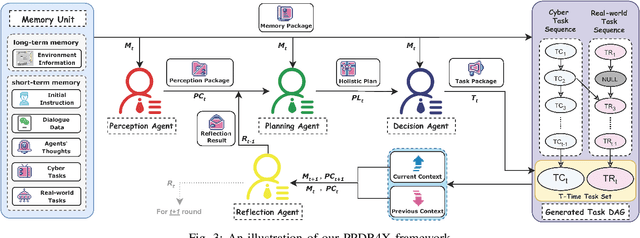

The increasing demand for intelligent assistants in human-populated environments has motivated significant research in autonomous robotic systems. Traditional service robots and virtual assistants, however, struggle with real-world task execution due to their limited capacity for dynamic reasoning and interaction, particularly when human collaboration is required. Recent developments in Large Language Models have opened new avenues for improving these systems, enabling more sophisticated reasoning and natural interaction capabilities. In this paper, we introduce AssistantX, an LLM-powered proactive assistant designed to operate autonomously in a physical office environment. Unlike conventional service robots, AssistantX leverages a novel multi-agent architecture, PPDR4X, which provides advanced inference capabilities and comprehensive collaboration awareness. By effectively bridging the gap between virtual operations and physical interactions, AssistantX demonstrates robust performance in managing complex real-world scenarios. Our evaluation highlights the architecture's effectiveness, showing that AssistantX can respond to clear instructions, actively retrieve supplementary information from memory, and proactively seek collaboration from team members to ensure successful task completion. More details and videos can be found at https://assistantx-agent.github.io/AssistantX/.