 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Data-Driven SSM for Interpretable and Label-Free mmWave Channel Prediction
Nov 18, 2024



Accurate prediction of mmWave time-varying channels is essential for mitigating the issue of channel aging in complex scenarios owing to high user mobility. Existing channel prediction methods have limitations: classical model-based methods often struggle to track highly nonlinear channel dynamics due to limited expert knowledge, while emerging data-driven methods typically require substantial labeled data for effective training and often lack interpretability. To address these issues, this paper proposes a novel hybrid method that integrates a data-driven neural network into a conventional model-based workflow based on a state-space model (SSM), implicitly tracking complex channel dynamics from data without requiring precise expert knowledge. Additionally, a novel unsupervised learning strategy is developed to train the embedded neural network solely with unlabeled data. Theoretical analyses and ablation studies are conducted to interpret the enhanced benefits gained from the hybrid integration. Numerical simulations based on the 3GPP mmWave channel model corroborate the superior prediction accuracy of the proposed method, compared to state-of-the-art methods that are either purely model-based or data-driven. Furthermore, extensive experiments validate its robustness against various challenging factors, including among others severe channel variations and high noise levels.
Equilibrium Adaptation-Based Control for Track Stand of Single-Track Two-Wheeled Robots
Oct 25, 2024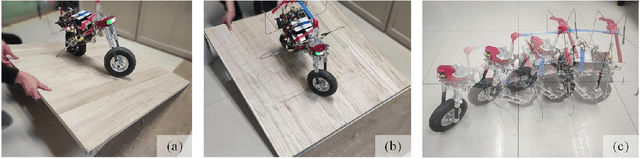
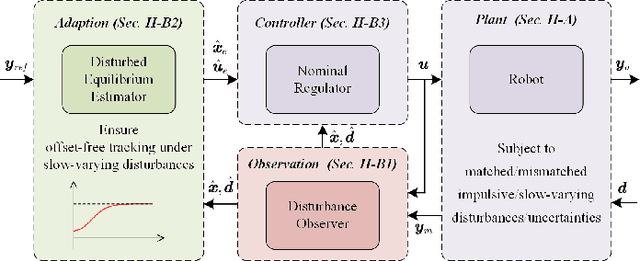


Stationary balance control is challenging for single-track two-wheeled (STTW) robots due to the lack of elegant balancing mechanisms and the conflict between the limited attraction domain and external disturbances. To address the absence of balancing mechanisms, we draw inspiration from cyclists and leverage the track stand maneuver, which relies solely on steering and rear-wheel actuation. To achieve accurate tracking in the presence of matched and mismatched disturbances, we propose an equilibrium adaptation-based control (EABC) scheme that can be seamlessly integrated with standard disturbance observers and controllers. This scheme enables adaptation to slow-varying disturbances by utilizing a disturbed equilibrium estimator, effectively handling both matched and mismatched disturbances in a unified manner while ensuring accurate tracking with zero steady-state error. We integrate the EABC scheme with nonlinear model predictive control (MPC) for the track stand of STTW robots and validate its effectiveness through two experimental scenarios. Our method demonstrates significant improvements in tracking accuracy, reducing errors by several orders of magnitude.
Regularization-Based Efficient Continual Learning in Deep State-Space Models
Mar 15, 2024
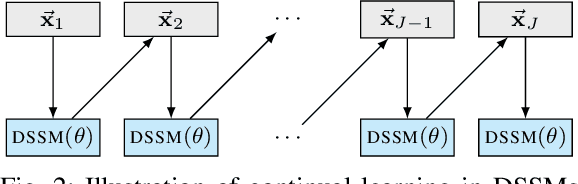
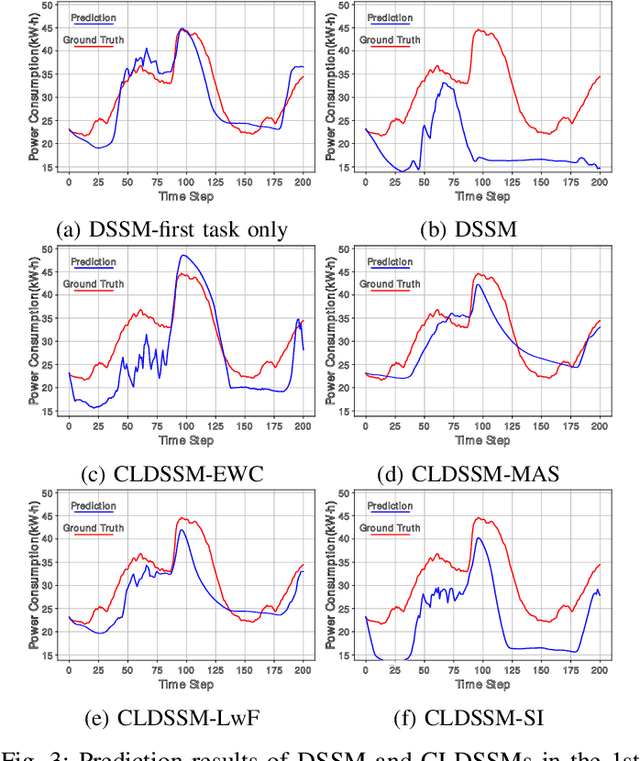
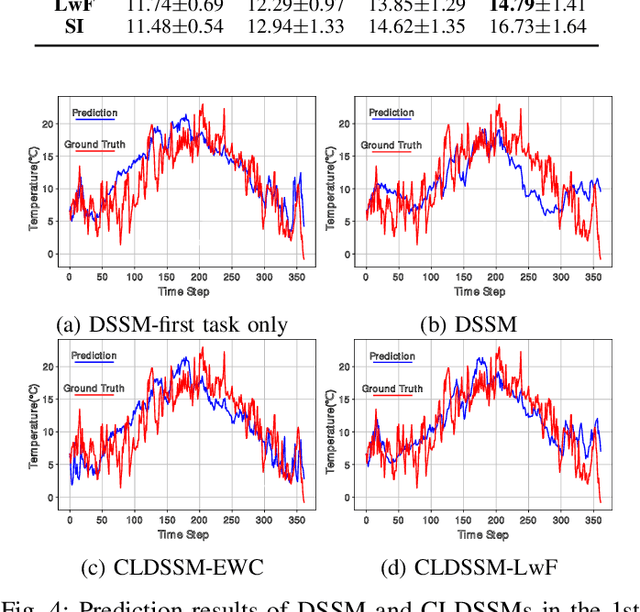
Deep state-space models (DSSMs) have gained popularity in recent years due to their potent modeling capacity for dynamic systems. However, existing DSSM works are limited to single-task modeling, which requires retraining with historical task data upon revisiting a forepassed task. To address this limitation, we propose continual learning DSSMs (CLDSSMs), which are capable of adapting to evolving tasks without catastrophic forgetting. Our proposed CLDSSMs integrate mainstream regularization-based continual learning (CL) methods, ensuring efficient updates with constant computational and memory costs for modeling multiple dynamic systems. We also conduct a comprehensive cost analysis of each CL method applied to the respective CLDSSMs, and demonstrate the efficacy of CLDSSMs through experiments on real-world datasets. The results corroborate that while various competing CL methods exhibit different merits, the proposed CLDSSMs consistently outperform traditional DSSMs in terms of effectively addressing catastrophic forgetting, enabling swift and accurate parameter transfer to new tasks.
Ensemble Kalman Filtering-Aided Variational Inference for Gaussian Process State-Space Models
Dec 23, 2023



Gaussian process state-space models (GPSSMs) are a flexible and principled approach for modeling dynamical systems. However, existing variational learning and inference methods for GPSSMs often necessitate optimizing a substantial number of variational distribution parameters, leading to inadequate performance and efficiency. To overcome this issue, we propose incorporating the ensemble Kalman filter (EnKF), a well-established model-based filtering technique, into the variational inference framework to approximate the posterior distribution of latent states. This utilization of EnKF can effectively exploit the dependencies between latent states and GP dynamics, while eliminating the need for parameterizing the variational distribution, thereby significantly reducing the number of variational parameters. Moreover, we show that our proposed algorithm allows straightforward evaluation of an approximated evidence lower bound (ELBO) in variational inference via simply summating multiple terms with readily available closed-form solutions. Leveraging automatic differentiation tools, we hence can maximize the ELBO and train the GPSSM efficiently. We also extend the proposed algorithm to an online setting and provide detailed algorithmic analyses and insights. Extensive evaluation on diverse real and synthetic datasets demonstrates the superiority of our EnKF-aided variational inference algorithms in terms of learning and inference performance compared to existing methods.