 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Angle-Delay-Doppler Estimation Scheme for AFDM-ISAC System in Mixed Near-field and Far-field Scenarios
Apr 09, 2025The recently proposed multi-chirp waveform, affine frequency division multiplexing (AFDM), is considered as a potential candidate for integrated sensing and communication (ISAC). However, acquiring accurate target sensing parameter information becomes challenging due to fractional delay and Doppler shift occurrence, as well as effects introduced by the coexistence of near-field (NF) and far-field (FF) targets associated with large-scale antenna systems. In this paper, we propose a novel angle-delay-Doppler estimation scheme for AFDM-ISAC system in mixed NF and FF scenarios. Specifically, we model the received ISAC signals as a third-order tensor that admits a low-rank CANDECOMP/PARAFAC (CP) format. By employing the Vandermonde nature of the factor matrix and the spatial smoothing technique, we develop a structured CP decomposition method that guarantees the condition for uniqueness. We further propose a low-complexity estimation scheme to acquire target sensing parameters with fractional values, including angle of arrival/departure (AoA/AoD), delay and Doppler shift accurately. We also derive the Cram\'er-Rao Lower Bound (CRLB) as a benchmark and analyze the complexity of our proposed scheme. Finally, simulation results are provided to demonstrate the effectiveness and superiority of our proposed scheme.
Target Sensing With Off-grid Sparse Bayesian Learning for AFDM-ISAC System
Mar 13, 2025The recently proposed multi-chirp waveform, affine frequency division multiplexing (AFDM), is regarded as a prospective candidate for integrated sensing and communication (ISAC) due to its robust performance in high-mobility scenarios and full diversity achievement in doubly dispersive channels. However, the insufficient Doppler resolution caused by limited transmission duration can reduce the accuracy of parameter estimation. In this paper, we propose a new off-grid target parameter estimation scheme to jointly estimate the range and velocity of the targets for AFDM-ISAC system, where the off-grid Doppler components are incorporated to enhance estimation accuracy. Specifically, we form the sensing model as an off-grid sparse signal recovery problem relying on the virtual delay and Doppler grids defined in the discrete affine Fourier (DAF) domain, where the off-grid components are regarded as hyper-parameters for estimation. We also employ the expectation-maximization (EM) technique via a sparse Bayesian learning (SBL) framework to update hyper-parameters iteratively. Simulation results indicate that our proposed off-grid algorithm outperforms existing algorithms in sensing performance and is highly robust to the AFDM-ISAC high-mobility scenario.
Vehicle Reconstruction and Texture Estimation Using Deep Implicit Semantic Template Mapping
Nov 30, 2020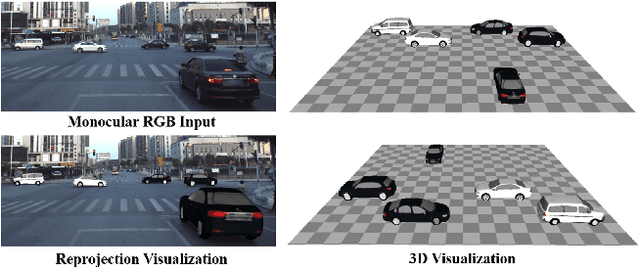
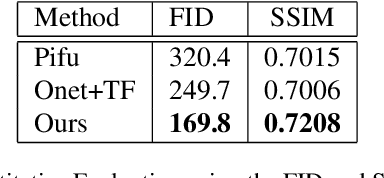
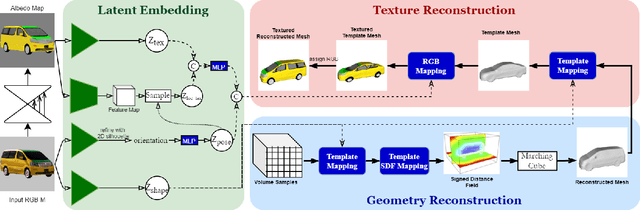
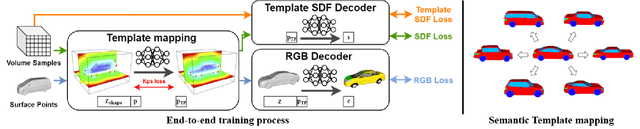
We introduce VERTEX, an effective solution to recover 3D shape and intrinsic texture of vehicles from uncalibrated monocular input in real-world street environments. To fully utilize the template prior of vehicles, we propose a novel geometry and texture joint representation, based on implicit semantic template mapping. Compared to existing representations which infer 3D texture distribution, our method explicitly constrains the texture distribution on the 2D surface of the template as well as avoids limitations of fixed resolution and topology. Moreover, by fusing the global and local features together, our approach is capable to generate consistent and detailed texture in both visible and invisible areas. We also contribute a new synthetic dataset containing 830 elaborate textured car models labeled with sparse key points and rendered using Physically Based Rendering (PBRT) system with measured HDRI skymaps to obtain highly realistic images. Experiments demonstrate the superior performance of our approach on both testing dataset and in-the-wild images. Furthermore, the presented technique enables additional applications such as 3D vehicle texture transfer and material identification.