 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial Autoregressive Coding for Graph Neural Recommendation
May 19, 2022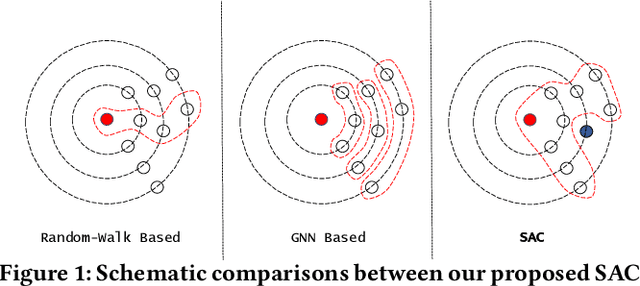
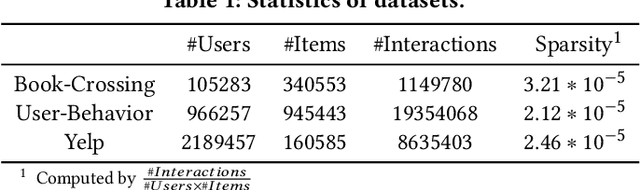
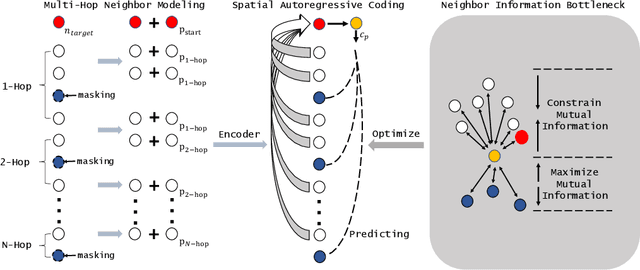
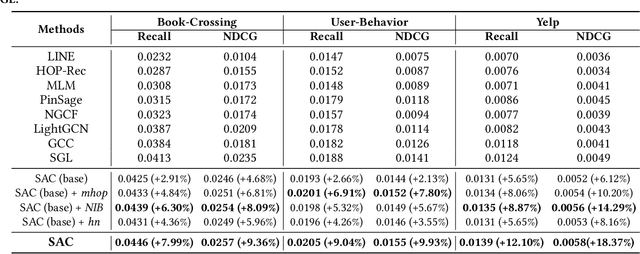
Graph embedding methods including traditional shallow models and deep Graph Neural Networks (GNNs) have led to promising applications in recommendation. Nevertheless, shallow models especially random-walk-based algorithms fail to adequately exploit neighbor proximity in sampled subgraphs or sequences due to their optimization paradigm. GNN-based algorithms suffer from the insufficient utilization of high-order information and easily cause over-smoothing problems when stacking too much layers, which may deteriorate the recommendations of low-degree (long-tail) items, limiting the expressiveness and scalability. In this paper, we propose a novel framework SAC, namely Spatial Autoregressive Coding, to solve the above problems in a unified way. To adequately leverage neighbor proximity and high-order information, we design a novel spatial autoregressive paradigm. Specifically, we first randomly mask multi-hop neighbors and embed the target node by integrating all other surrounding neighbors with an explicit multi-hop attention. Then we reinforce the model to learn a neighbor-predictive coding for the target node by contrasting the coding and the masked neighbors' embedding, equipped with a new hard negative sampling strategy. To learn the minimal sufficient representation for the target-to-neighbor prediction task and remove the redundancy of neighbors, we devise Neighbor Information Bottleneck by maximizing the mutual information between target predictive coding and the masked neighbors' embedding, and simultaneously constraining those between the coding and surrounding neighbors' embedding. Experimental results on both public recommendation datasets and a real scenario web-scale dataset Douyin-Friend-Recommendation demonstrate the superiority of SAC compared with state-of-the-art methods.
Mask Propagation Network for Video Object Segmentation
Oct 24, 2018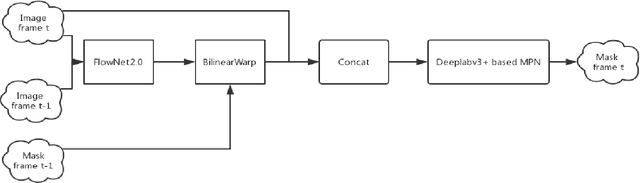

In this work, we propose a mask propagation network to treat the video segmentation problem as a concept of the guided instance segmentation. Similar to most MaskTrack based video segmentation methods, our method takes the mask probability map of previous frame and the appearance of current frame as inputs, and predicts the mask probability map for the current frame. Specifically, we adopt the Xception backbone based DeepLab v3+ model as the probability map predictor in our prediction pipeline. Besides, instead of the full image and the original mask probability, our network takes the region of interest of the instance, and the new mask probability which warped by the optical flow between the previous and current frames as the inputs. We also ensemble the modified One-Shot Video Segmentation Network to make the final predictions in order to retrieve and segment the missing instance.