 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAD: Training an End-to-End Driving Policy via Large-Scale 3DGS-based Reinforcement Learning
Feb 18, 2025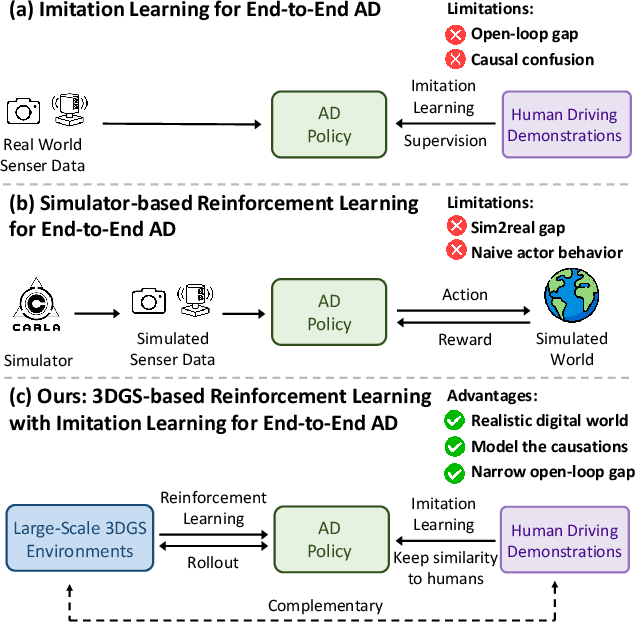
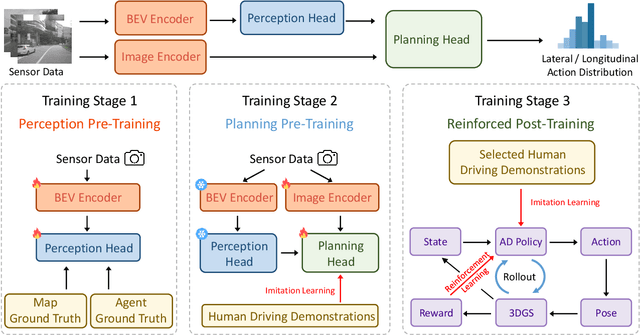
Existing end-to-end autonomous driving (AD) algorithms typically follow the Imitation Learning (IL) paradigm, which faces challenges such as causal confusion and the open-loop gap. In this work, we establish a 3DGS-based closed-loop Reinforcement Learning (RL) training paradigm. By leveraging 3DGS techniques, we construct a photorealistic digital replica of the real physical world, enabling the AD policy to extensively explore the state space and learn to handle out-of-distribution scenarios through large-scale trial and error. To enhance safety, we design specialized rewards that guide the policy to effectively respond to safety-critical events and understand real-world causal relationships. For better alignment with human driving behavior, IL is incorporated into RL training as a regularization term. We introduce a closed-loop evaluation benchmark consisting of diverse, previously unseen 3DGS environments. Compared to IL-based methods, RAD achieves stronger performance in most closed-loop metrics, especially 3x lower collision rate. Abundant closed-loop results are presented at https://hgao-cv.github.io/RAD.
Occupancy as Set of Points
Jul 04, 2024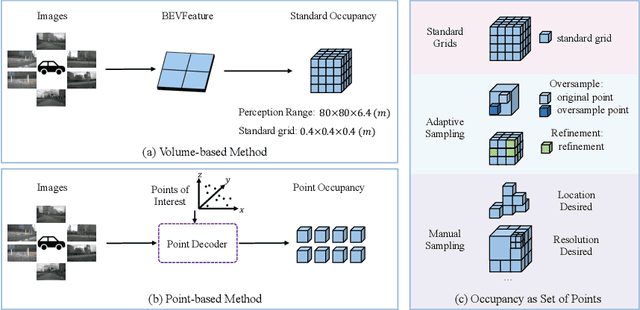
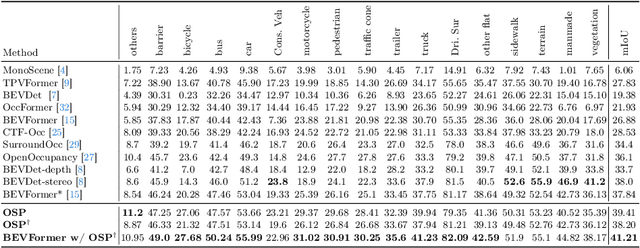
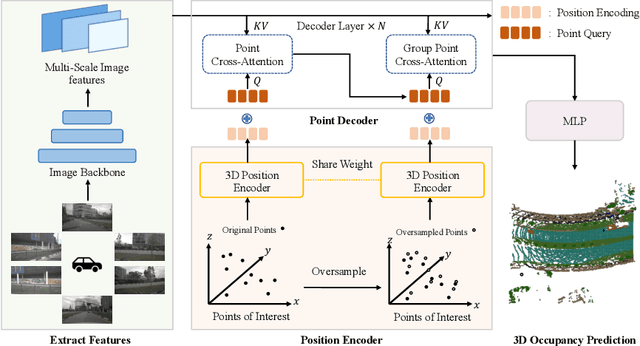

In this paper, we explore a novel point representation for 3D occupancy prediction from multi-view images, which is named Occupancy as Set of Points. Existing camera-based methods tend to exploit dense volume-based representation to predict the occupancy of the whole scene, making it hard to focus on the special areas or areas out of the perception range. In comparison, we present the Points of Interest (PoIs) to represent the scene and propose OSP, a novel framework for point-based 3D occupancy prediction. Owing to the inherent flexibility of the point-based representation, OSP achieves strong performance compared with existing methods and excels in terms of training and inference adaptability. It extends beyond traditional perception boundaries and can be seamlessly integrated with volume-based methods to significantly enhance their effectiveness. Experiments on the Occ3D nuScenes occupancy benchmark show that OSP has strong performance and flexibility. Code and models are available at \url{https://github.com/hustvl/osp}.