 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAOMGen: Photoreal, Physics-Consistent Demonstration Generation for Articulated Object Manipulation
Dec 20, 2025
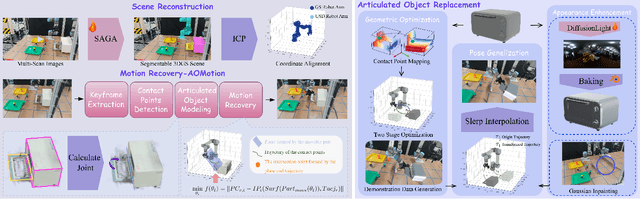


Recent advances in Vision-Language-Action (VLA) and world-model methods have improved generalization in tasks such as robotic manipulation and object interaction. However, Successful execution of such tasks depends on large, costly collections of real demonstrations, especially for fine-grained manipulation of articulated objects. To address this, we present AOMGen, a scalable data generation framework for articulated manipulation which is instantiated from a single real scan, demonstration and a library of readily available digital assets, yielding photoreal training data with verified physical states. The framework synthesizes synchronized multi-view RGB temporally aligned with action commands and state annotations for joints and contacts, and systematically varies camera viewpoints, object styles, and object poses to expand a single execution into a diverse corpus. Experimental results demonstrate that fine-tuning VLA policies on AOMGen data increases the success rate from 0% to 88.7%, and the policies are tested on unseen objects and layouts.
ArtGen: Conditional Generative Modeling of Articulated Objects in Arbitrary Part-Level States
Dec 13, 2025Generating articulated assets is crucial for robotics, digital twins, and embodied intelligence. Existing generative models often rely on single-view inputs representing closed states, resulting in ambiguous or unrealistic kinematic structures due to the entanglement between geometric shape and joint dynamics. To address these challenges, we introduce ArtGen, a conditional diffusion-based framework capable of generating articulated 3D objects with accurate geometry and coherent kinematics from single-view images or text descriptions at arbitrary part-level states. Specifically, ArtGen employs cross-state Monte Carlo sampling to explicitly enforce global kinematic consistency, reducing structural-motion entanglement. Additionally, we integrate a Chain-of-Thought reasoning module to infer robust structural priors, such as part semantics, joint types, and connectivity, guiding a sparse-expert Diffusion Transformer to specialize in diverse kinematic interactions. Furthermore, a compositional 3D-VAE latent prior enhanced with local-global attention effectively captures fine-grained geometry and global part-level relationships. Extensive experiments on the PartNet-Mobility benchmark demonstrate that ArtGen significantly outperforms state-of-the-art methods.
Self-Supervised Multi-Part Articulated Objects Modeling via Deformable Gaussian Splatting and Progressive Primitive Segmentation
Jun 11, 2025Articulated objects are ubiquitous in everyday life, and accurate 3D representations of their geometry and motion are critical for numerous applications. However, in the absence of human annotation, existing approaches still struggle to build a unified representation for objects that contain multiple movable parts. We introduce DeGSS, a unified framework that encodes articulated objects as deformable 3D Gaussian fields, embedding geometry, appearance, and motion in one compact representation. Each interaction state is modeled as a smooth deformation of a shared field, and the resulting deformation trajectories guide a progressive coarse-to-fine part segmentation that identifies distinct rigid components, all in an unsupervised manner. The refined field provides a spatially continuous, fully decoupled description of every part, supporting part-level reconstruction and precise modeling of their kinematic relationships. To evaluate generalization and realism, we enlarge the synthetic PartNet-Mobility benchmark and release RS-Art, a real-to-sim dataset that pairs RGB captures with accurately reverse-engineered 3D models. Extensive experiments demonstrate that our method outperforms existing methods in both accuracy and stability.
SM$^3$: Self-Supervised Multi-task Modeling with Multi-view 2D Images for Articulated Objects
Jan 17, 2024



Reconstructing real-world objects and estimating their movable joint structures are pivotal technologies within the field of robotics. Previous research has predominantly focused on supervised approaches, relying on extensively annotated datasets to model articulated objects within limited categories. However, this approach falls short of effectively addressing the diversity present in the real world. To tackle this issue, we propose a self-supervised interaction perception method, referred to as SM$^3$, which leverages multi-view RGB images captured before and after interaction to model articulated objects, identify the movable parts, and infer the parameters of their rotating joints. By constructing 3D geometries and textures from the captured 2D images, SM$^3$ achieves integrated optimization of movable part and joint parameters during the reconstruction process, obviating the need for annotations. Furthermore, we introduce the MMArt dataset, an extension of PartNet-Mobility, encompassing multi-view and multi-modal data of articulated objects spanning diverse categories. Evaluations demonstrate that SM$^3$ surpasses existing benchmarks across various categories and objects, while its adaptability in real-world scenarios has been thoroughly validated.
DTF-Net: Category-Level Pose Estimation and Shape Reconstruction via Deformable Template Field
Aug 04, 2023
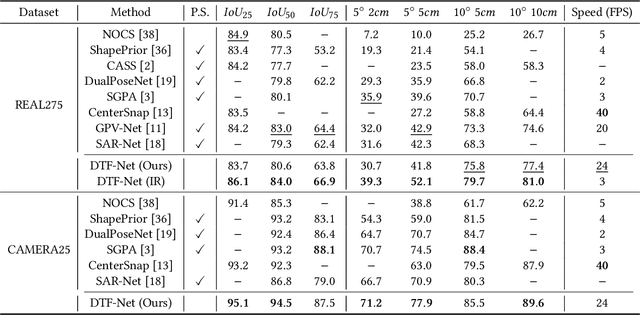


Estimating 6D poses and reconstructing 3D shapes of objects in open-world scenes from RGB-depth image pairs is challenging. Many existing methods rely on learning geometric features that correspond to specific templates while disregarding shape variations and pose differences among objects in the same category. As a result, these methods underperform when handling unseen object instances in complex environments. In contrast, other approaches aim to achieve category-level estimation and reconstruction by leveraging normalized geometric structure priors, but the static prior-based reconstruction struggles with substantial intra-class variations. To solve these problems, we propose the DTF-Net, a novel framework for pose estimation and shape reconstruction based on implicit neural fields of object categories. In DTF-Net, we design a deformable template field to represent the general category-wise shape latent features and intra-category geometric deformation features. The field establishes continuous shape correspondences, deforming the category template into arbitrary observed instances to accomplish shape reconstruction. We introduce a pose regression module that shares the deformation features and template codes from the fields to estimate the accurate 6D pose of each object in the scene. We integrate a multi-modal representation extraction module to extract object features and semantic masks, enabling end-to-end inference. Moreover, during training, we implement a shape-invariant training strategy and a viewpoint sampling method to further enhance the model's capability to extract object pose features. Extensive experiments on the REAL275 and CAMERA25 datasets demonstrate the superiority of DTF-Net in both synthetic and real scenes. Furthermore, we show that DTF-Net effectively supports grasping tasks with a real robot arm.