 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Fault-tolerant Control of Underwater Vehicles with Thruster Failures
Apr 22, 2025
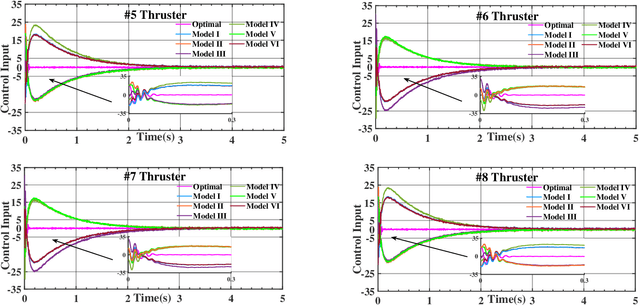
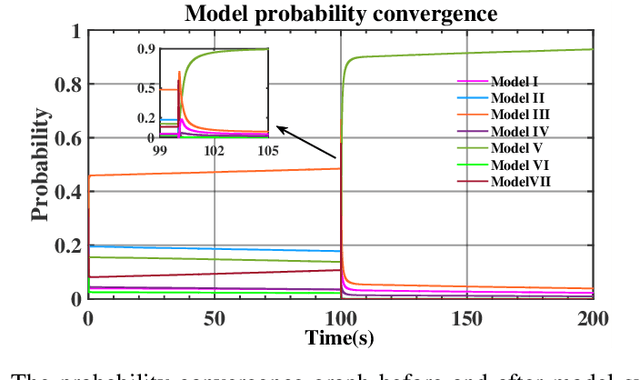
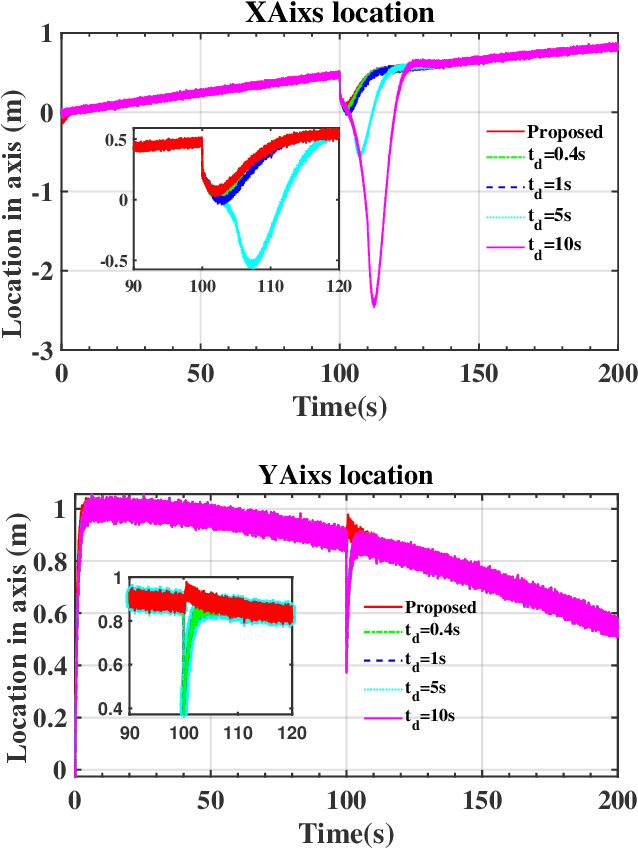
This paper presents a fault-tolerant control for the trajectory tracking of autonomous underwater vehicles (AUVs) against thruster failures. We formulate faults in AUV thrusters as discrete switching events during a UAV mission, and develop a soft-switching approach in facilitating shift of control strategies across fault scenarios. We mathematically define AUV thruster fault scenarios, and develop the fault-tolerant control that captures the fault scenario via Bayesian approach. Particularly, when the AUV fault type switches from one to another, the developed control captures the fault states and maintains the control by a linear quadratic tracking controller. With the captured fault states by Bayesian approach, we derive the control law by aggregating the control outputs for individual fault scenarios weighted by their Bayesian posterior probability. The developed fault-tolerant control works in an adaptive way and guarantees soft-switching across fault scenarios, and requires no complicated fault detection dedicated to different type of faults. The entailed soft-switching ensures stable AUV trajectory tracking when fault type shifts, which otherwise leads to reduced control under hard-switching control strategies. We conduct numerical simulations with diverse AUV thruster fault settings. The results demonstrate that the proposed control can provide smooth transition across thruster failures, and effectively sustain AUV trajectory tracking control in case of thruster failures and failure shifts.
Exploring the Generalizability of Geomagnetic Navigation: A Deep Reinforcement Learning approach with Policy Distillation
Feb 07, 2025



The advancement in autonomous vehicles has empowered navigation and exploration in unknown environments. Geomagnetic navigation for autonomous vehicles has drawn increasing attention with its independence from GPS or inertial navigation devices. While geomagnetic navigation approaches have been extensively investigated, the generalizability of learned geomagnetic navigation strategies remains unexplored. The performance of a learned strategy can degrade outside of its source domain where the strategy is learned, due to a lack of knowledge about the geomagnetic characteristics in newly entered areas. This paper explores the generalization of learned geomagnetic navigation strategies via deep reinforcement learning (DRL). Particularly, we employ DRL agents to learn multiple teacher models from distributed domains that represent dispersed navigation strategies, and amalgamate the teacher models for generalizability across navigation areas. We design a reward shaping mechanism in training teacher models where we integrate both potential-based and intrinsic-motivated rewards. The designed reward shaping can enhance the exploration efficiency of the DRL agent and improve the representation of the teacher models. Upon the gained teacher models, we employ multi-teacher policy distillation to merge the policies learned by individual teachers, leading to a navigation strategy with generalizability across navigation domains. We conduct numerical simulations, and the results demonstrate an effective transfer of the learned DRL model from a source domain to new navigation areas. Compared to existing evolutionary-based geomagnetic navigation methods, our approach provides superior performance in terms of navigation length, duration, heading deviation, and success rate in cross-domain navigation.
Hardware-in-the-loop Simulation Testbed for Geomagnetic Navigation
Dec 16, 2024



Geomagnetic navigation leverages the ubiquitous Earth's magnetic signals to navigate missions, without dependence on GPS services or pre-stored geographic maps. It has drawn increasing attention and is promising particularly for long-range navigation into unexplored areas. Current geomagnetic navigation studies are still in the early stages with simulations and computational validations, without concrete efforts to develop cost-friendly test platforms that can empower deployment and experimental analysis of the developed approaches. This paper presents a hardware-in-the-loop simulation testbed to support geomagnetic navigation experimentation. Our testbed is dedicated to synthesizing geomagnetic field environment for the navigation. We develop the software in the testbed to simulate the dynamics of the navigation environment, and we build the hardware to generate the physical magnetic field, which follows and aligns with the simulated environment. The testbed aims to provide controllable magnetic field that can be used to experiment with geomagnetic navigation in labs, thus avoiding real and expensive navigation experiments, e.g., in the ocean, for validating navigation prototypes. We build the testbed with off-the-shelf hardware in an unshielded environment to reduce cost. We also develop the field generation control and hardware parameter optimization for quality magnetic field generation. We conduct a detailed performance analysis to show the quality of the field generation by the testbed, and we report the experimental results on performance indicators, including accuracy, uniformity, stability, and convergence of the generated field towards the target geomagnetic environment.
Extended vehicle energy dataset (eVED): an enhanced large-scale dataset for deep learning on vehicle trip energy consumption
Mar 16, 2022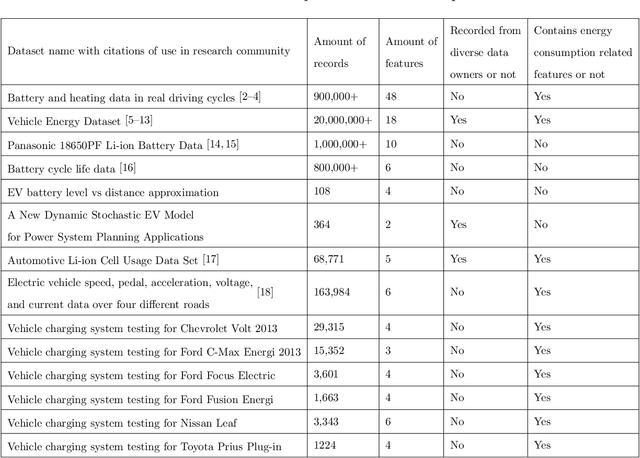

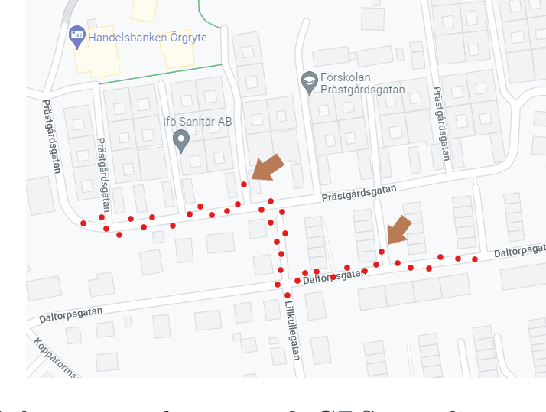
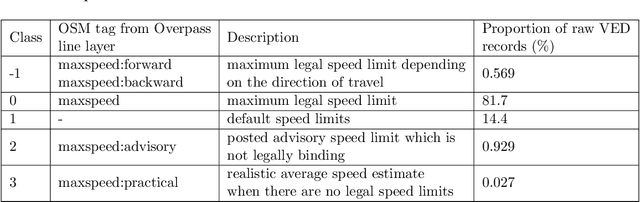
This work presents an extended version of the Vehicle Energy Dataset (VED), which is a openly released large-scale dataset for vehicle energy consumption analysis. Compared with its original version, the extended VED (eVED) dataset is enhanced with accurate vehicle trip GPS coordinates, serving as a basis to associate the VED trip records with external information, e.g., road speed limit and intersections, from accessible map services to accumulate attributes that is essential in analyzing vehicle energy consumption. In particularly, we calibrate all the GPS trace records in the original VED data, upon which we associated the VED data with attributes extracted from the Geographic Information System (QGIS), the Overpass API, the Open Street Map API, and Google Maps API. The associated attributes include 12,609,170 records of road elevation, 12,203,044 of speed limit, 12,281,719 of speed limit with direction (in case the road is bi-directional), 584,551 of intersections, 429,638 of bus stop, 312,196 of crossings, 195,856 of traffic signals, 29,397 of stop signs, 5,848 of turning loops, 4,053 of railway crossings (level crossing), 3,554 of turning circles, and 2,938 of motorway junctions. With the accurate GPS coordinates and enriched features of the vehicle trip record, the obtained eVED dataset can provide a precise and abundant medium to feed a learning engine, especially a deep learning engine that is more demanding on data sufficiency and richness. Moreover, our software work for data calibration and enrichment can be reused to generate further vehicle trip datasets for specific user cases, contributing to deep insights into vehicle behaviors and traffic dynamics analyses. We anticipate that the eVED dataset and our data enrichment software can serve the academic and industrial automotive section as apparatus in developing future technologies.
Contextualize differential privacy in image database: a lightweight image differential privacy approach based on principle component analysis inverse
Feb 19, 2022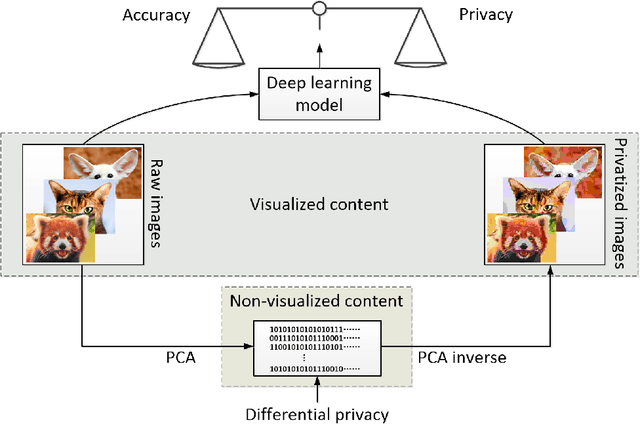


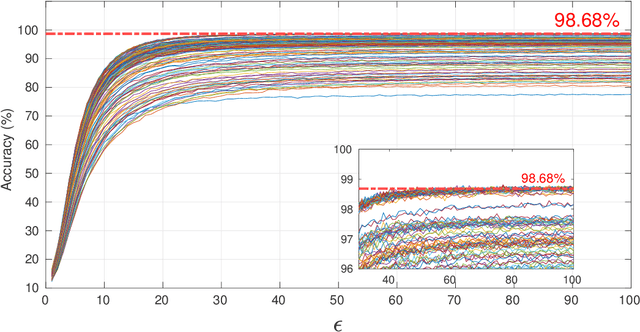
Differential privacy (DP) has been the de-facto standard to preserve privacy-sensitive information in database. Nevertheless, there lacks a clear and convincing contextualization of DP in image database, where individual images' indistinguishable contribution to a certain analysis can be achieved and observed when DP is exerted. As a result, the privacy-accuracy trade-off due to integrating DP is insufficiently demonstrated in the context of differentially-private image database. This work aims at contextualizing DP in image database by an explicit and intuitive demonstration of integrating conceptional differential privacy with images. To this end, we design a lightweight approach dedicating to privatizing image database as a whole and preserving the statistical semantics of the image database to an adjustable level, while making individual images' contribution to such statistics indistinguishable. The designed approach leverages principle component analysis (PCA) to reduce the raw image with large amount of attributes to a lower dimensional space whereby DP is performed, so as to decrease the DP load of calculating sensitivity attribute-by-attribute. The DP-exerted image data, which is not visible in its privatized format, is visualized through PCA inverse such that both a human and machine inspector can evaluate the privatization and quantify the privacy-accuracy trade-off in an analysis on the privatized image database. Using the devised approach, we demonstrate the contextualization of DP in images by two use cases based on deep learning models, where we show the indistinguishability of individual images induced by DP and the privatized images' retention of statistical semantics in deep learning tasks, which is elaborated by quantitative analyses on the privacy-accuracy trade-off under different privatization settings.