 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwinTrack: Bridging Vision and Contact Physics for Real-Time Tracking of Unknown Dynamic Objects
May 28, 2025
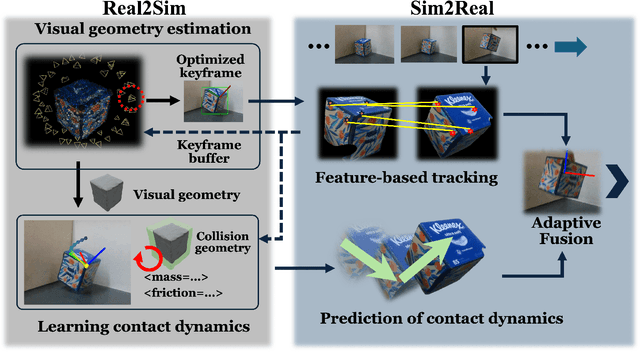
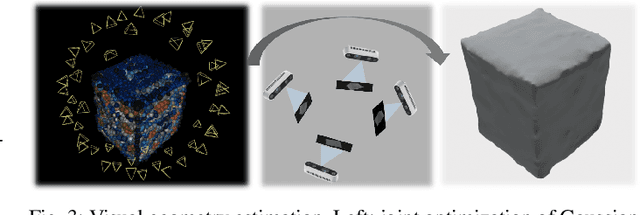
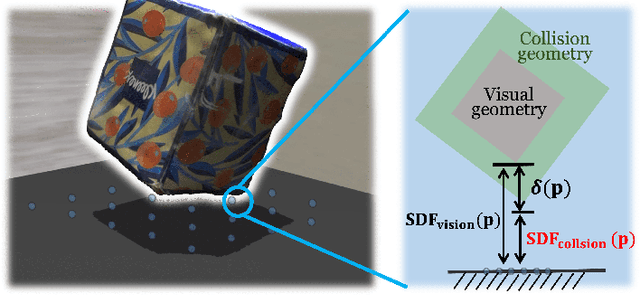
Real-time tracking of previously unseen, highly dynamic objects in contact-rich environments -- such as during dexterous in-hand manipulation -- remains a significant challenge. Purely vision-based tracking often suffers from heavy occlusions due to the frequent contact interactions and motion blur caused by abrupt motion during contact impacts. We propose TwinTrack, a physics-aware visual tracking framework that enables robust and real-time 6-DoF pose tracking of unknown dynamic objects in a contact-rich scene by leveraging the contact physics of the observed scene. At the core of TwinTrack is an integration of Real2Sim and Sim2Real. In Real2Sim, we combine the complementary strengths of vision and contact physics to estimate object's collision geometry and physical properties: object's geometry is first reconstructed from vision, then updated along with other physical parameters from contact dynamics for physical accuracy. In Sim2Real, robust pose estimation of the object is achieved by adaptive fusion between visual tracking and prediction of the learned contact physics. TwinTrack is built on a GPU-accelerated, deeply customized physics engine to ensure real-time performance. We evaluate our method on two contact-rich scenarios: object falling with rich contact impacts against the environment, and contact-rich in-hand manipulation. Experimental results demonstrate that, compared to baseline methods, TwinTrack achieves significantly more robust, accurate, and real-time 6-DoF tracking in these challenging scenarios, with tracking speed exceeding 20 Hz. Project page: https://irislab.tech/TwinTrack-webpage/
Affordance-Driven Next-Best-View Planning for Robotic Grasping
Sep 18, 2023Grasping occluded objects in cluttered environments is an essential component in complex robotic manipulation tasks. In this paper, we introduce an AffordanCE-driven Next-Best-View planning policy (ACE-NBV) that tries to find a feasible grasp for target object via continuously observing scenes from new viewpoints. This policy is motivated by the observation that the grasp affordances of an occluded object can be better-measured under the view when the view-direction are the same as the grasp view. Specifically, our method leverages the paradigm of novel view imagery to predict the grasps affordances under previously unobserved view, and select next observation view based on the gain of the highest imagined grasp quality of the target object. The experimental results in simulation and on the real robot demonstrate the effectiveness of the proposed affordance-driven next-best-view planning policy. Additional results, code, and videos of real robot experiments can be found in the supplementary materials.
Toward Global Sensing Quality Maximization: A Configuration Optimization Scheme for Camera Networks
Nov 28, 2022The performance of a camera network monitoring a set of targets depends crucially on the configuration of the cameras. In this paper, we investigate the reconfiguration strategy for the parameterized camera network model, with which the sensing qualities of the multiple targets can be optimized globally and simultaneously. We first propose to use the number of pixels occupied by a unit-length object in image as a metric of the sensing quality of the object, which is determined by the parameters of the camera, such as intrinsic, extrinsic, and distortional coefficients. Then, we form a single quantity that measures the sensing quality of the targets by the camera network. This quantity further serves as the objective function of our optimization problem to obtain the optimal camera configuration. We verify the effectiveness of our approach through extensive simulations and experiments, and the results reveal its improved performance on the AprilTag detection tasks. Codes and related utilities for this work are open-sourced and available at https://github.com/sszxc/MultiCam-Simulation.