 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Global Sensing Quality Maximization: A Configuration Optimization Scheme for Camera Networks
Nov 28, 2022The performance of a camera network monitoring a set of targets depends crucially on the configuration of the cameras. In this paper, we investigate the reconfiguration strategy for the parameterized camera network model, with which the sensing qualities of the multiple targets can be optimized globally and simultaneously. We first propose to use the number of pixels occupied by a unit-length object in image as a metric of the sensing quality of the object, which is determined by the parameters of the camera, such as intrinsic, extrinsic, and distortional coefficients. Then, we form a single quantity that measures the sensing quality of the targets by the camera network. This quantity further serves as the objective function of our optimization problem to obtain the optimal camera configuration. We verify the effectiveness of our approach through extensive simulations and experiments, and the results reveal its improved performance on the AprilTag detection tasks. Codes and related utilities for this work are open-sourced and available at https://github.com/sszxc/MultiCam-Simulation.
Safety-Critical Optimal Control for Robotic Manipulators in A Cluttered Environment
Nov 11, 2022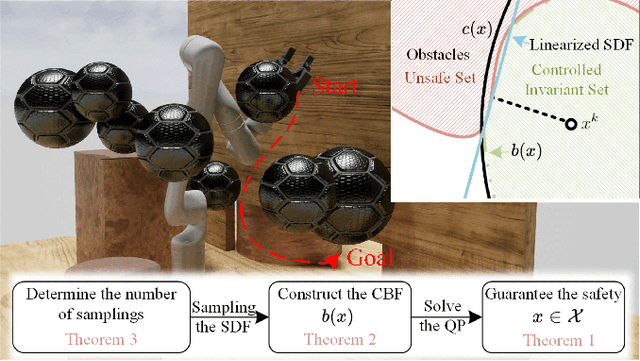
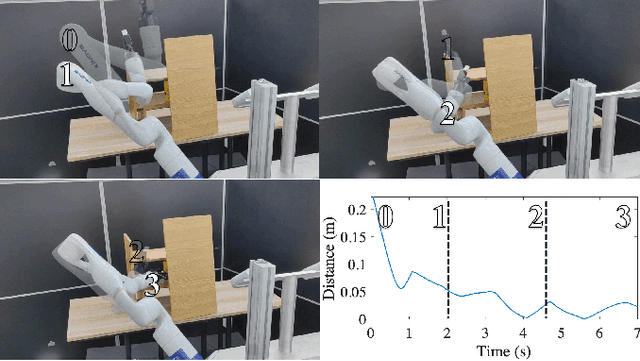
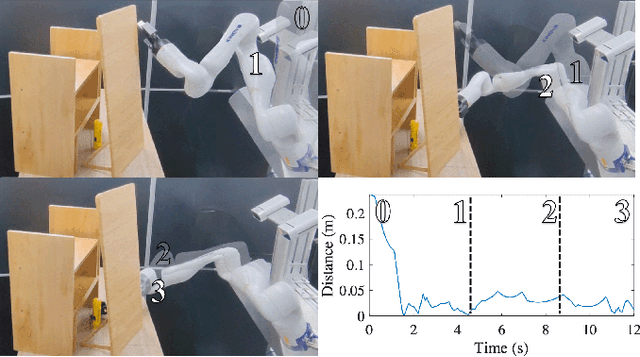
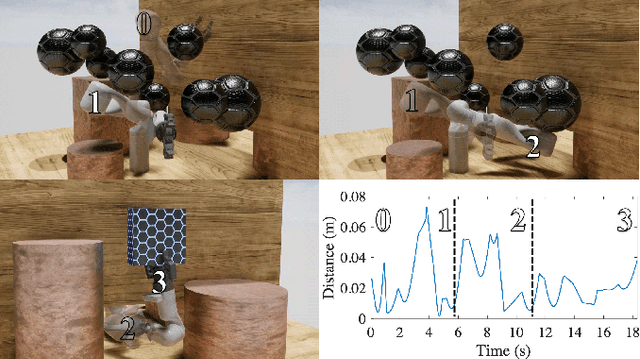
Designing safety-critical control for robotic manipulators is challenging, especially in a cluttered environment. First, the actual trajectory of a manipulator might deviate from the planned one due to the complex collision environments and non-trivial dynamics, leading to collision; Second, the feasible space for the manipulator is hard to obtain since the explicit distance functions between collision meshes are unknown. By analyzing the relationship between the safe set and the controlled invariant set, this paper proposes a data-driven control barrier function (CBF) construction method, which extracts CBF from distance samples. Specifically, the CBF guarantees the controlled invariant property for considering the system dynamics. The data-driven method samples the distance function and determines the safe set. Then, the CBF is synthesized based on the safe set by a scenario-based sum of square (SOS) program. Unlike most existing linearization based approaches, our method reserves the volume of the feasible space for planning without approximation, which helps find a solution in a cluttered environment. The control law is obtained by solving a CBF-based quadratic program in real time, which works as a safe filter for the desired planning-based controller. Moreover, our method guarantees safety with the proven probabilistic result. Our method is validated on a 7-DOF manipulator in both real and virtual cluttered environments. The experiments show that the manipulator is able to execute tasks where the clearance between obstacles is in millimeters.
Robopheus: A Virtual-Physical Interactive Mobile Robotic Testbed
Mar 07, 2021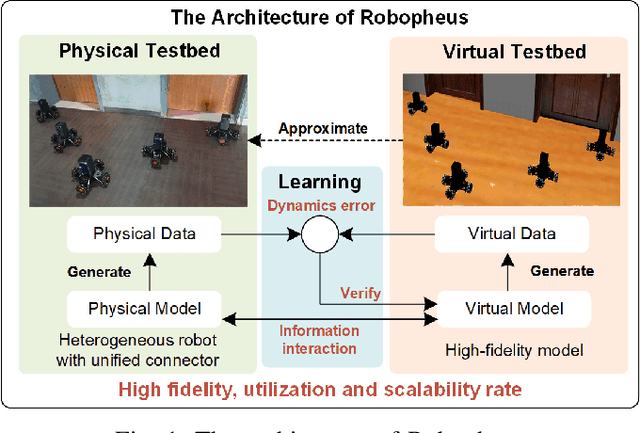
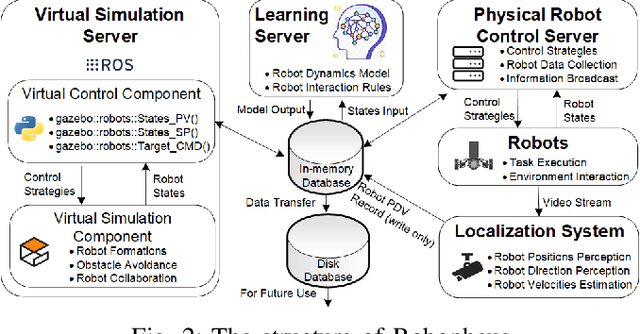
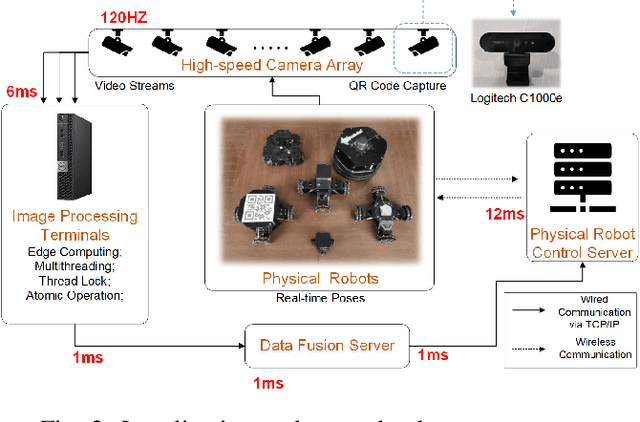
The mobile robotic testbed is an essential and critical support to verify the effectiveness of mobile robotics research. This paper introduces a novel multi-robot testbed, named Robopheus, which exploits the ideas of virtual-physical modeling in digital-twin. Unlike most existing testbeds, the developed Robopheus constructs a bridge that connects the traditional physical hardware and virtual simulation testbeds, providing scalable, interactive, and high-fidelity simulations-tests on both sides. Another salient feature of the Robopheus is that it enables a new form to learn the actual models from the physical environment dynamically and is compatible with heterogeneous robot chassis and controllers. In turn, the virtual world's learned models are further leveraged to approximate the robot dynamics online on the physical side. Extensive experiments demonstrate the extraordinary performance of the Robopheus. Significantly, the physical-virtual interaction design increases the trajectory accuracy of a real robot by 300%, compared with that of not using the interaction.