 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual-Horizon Hybrid Internal Model for Low-Gravity Quadrupedal Jumping with Hardware-in-the-Loop Validation
Mar 09, 2026Locomotion under reduced gravity is commonly realized through jumping, yet continuous pronking in lunar gravity remains challenging due to prolonged flight phases and sparse ground contact. The extended aerial duration increases landing impact sensitivity and makes stable attitude regulation over rough planetary terrain difficult. Existing approaches primarily address single jumps on flat surfaces and lack both continuous-terrain solutions and realistic hardware validation. This work presents a Dual-Horizon Hybrid Internal Model for continuous quadrupedal jumping under lunar gravity using proprioceptive sensing only. Two temporal encoders capture complementary time scales: a short-horizon branch models rapid vertical dynamics with explicit vertical velocity estimation, while a long-horizon branch models horizontal motion trends and center-of-mass height evolution across the jump cycle. The fused representation enables stable and continuous jumping under extended aerial phases characteristic of lunar gravity. To provide hardware-in-the-loop validation, we develop the MATRIX (Mixed-reality Adaptive Testbed for Robotic Integrated eXploration) platform, a digital-twin-driven system that offloads gravity through a pulley-counterweight mechanism and maps Unreal Engine lunar terrain to a motion platform and treadmill in real time. Using MATRIX, we demonstrate continuous jumping of a quadruped robot under lunar-gravity emulation across cratered lunar-like terrain.
ERNIE 5.0 Technical Report
Feb 04, 2026In this report, we introduce ERNIE 5.0, a natively autoregressive foundation model desinged for unified multimodal understanding and generation across text, image, video, and audio. All modalities are trained from scratch under a unified next-group-of-tokens prediction objective, based on an ultra-sparse mixture-of-experts (MoE) architecture with modality-agnostic expert routing. To address practical challenges in large-scale deployment under diverse resource constraints, ERNIE 5.0 adopts a novel elastic training paradigm. Within a single pre-training run, the model learns a family of sub-models with varying depths, expert capacities, and routing sparsity, enabling flexible trade-offs among performance, model size, and inference latency in memory- or time-constrained scenarios. Moreover, we systematically address the challenges of scaling reinforcement learning to unified foundation models, thereby guaranteeing efficient and stable post-training under ultra-sparse MoE architectures and diverse multimodal settings. Extensive experiments demonstrate that ERNIE 5.0 achieves strong and balanced performance across multiple modalities. To the best of our knowledge, among publicly disclosed models, ERNIE 5.0 represents the first production-scale realization of a trillion-parameter unified autoregressive model that supports both multimodal understanding and generation. To facilitate further research, we present detailed visualizations of modality-agnostic expert routing in the unified model, alongside comprehensive empirical analysis of elastic training, aiming to offer profound insights to the community.
Large receptive field strategy and important feature extraction strategy in 3D object detection
Jan 22, 2024The enhancement of 3D object detection is pivotal for precise environmental perception and improved task execution capabilities in autonomous driving. LiDAR point clouds, offering accurate depth information, serve as a crucial information for this purpose. Our study focuses on key challenges in 3D target detection. To tackle the challenge of expanding the receptive field of a 3D convolutional kernel, we introduce the Dynamic Feature Fusion Module (DFFM). This module achieves adaptive expansion of the 3D convolutional kernel's receptive field, balancing the expansion with acceptable computational loads. This innovation reduces operations, expands the receptive field, and allows the model to dynamically adjust to different object requirements. Simultaneously, we identify redundant information in 3D features. Employing the Feature Selection Module (FSM) quantitatively evaluates and eliminates non-important features, achieving the separation of output box fitting and feature extraction. This innovation enables the detector to focus on critical features, resulting in model compression, reduced computational burden, and minimized candidate frame interference. Extensive experiments confirm that both DFFM and FSM not only enhance current benchmarks, particularly in small target detection, but also accelerate network performance. Importantly, these modules exhibit effective complementarity.
Distributed Online Convex Optimization with Adversarial Constraints: Reduced Cumulative Constraint Violation Bounds under Slater's Condition
May 31, 2023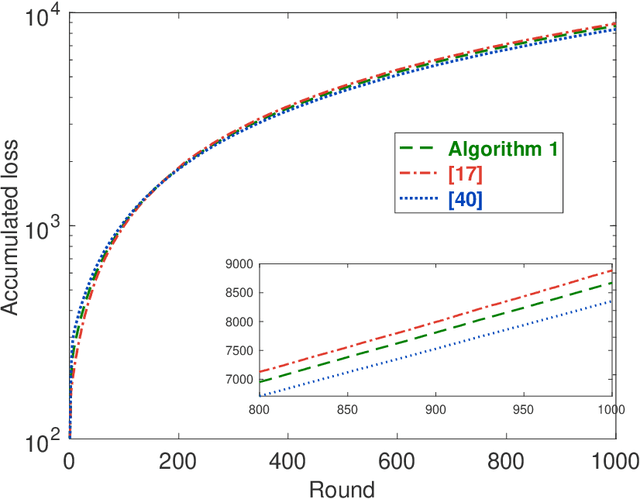
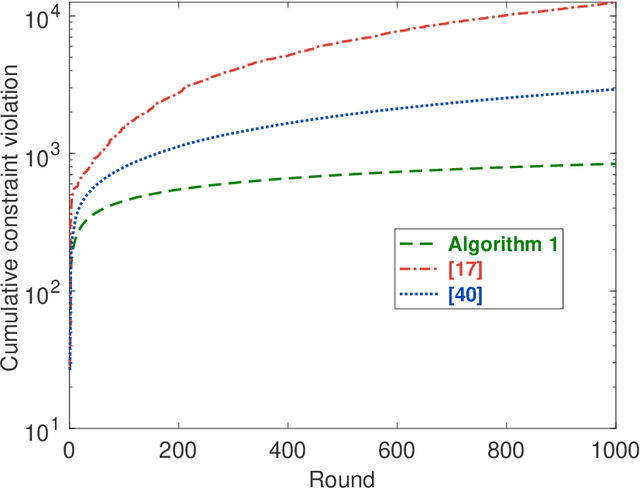
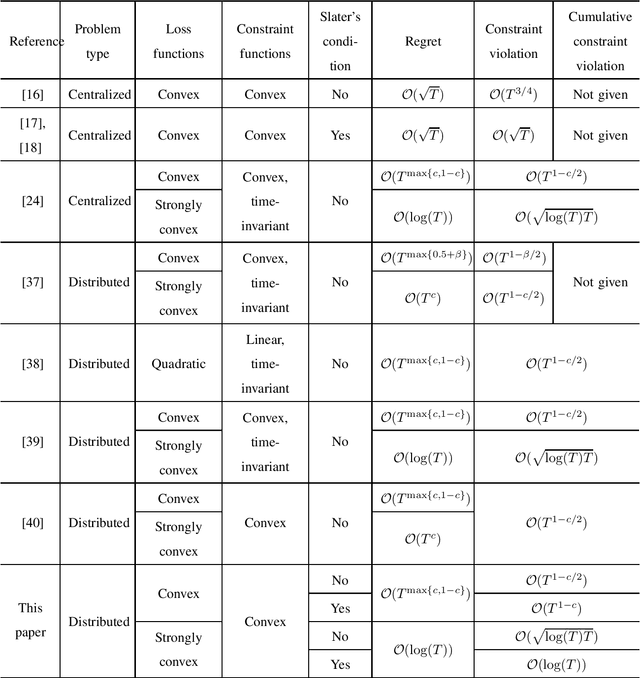
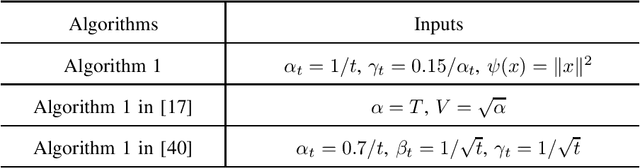
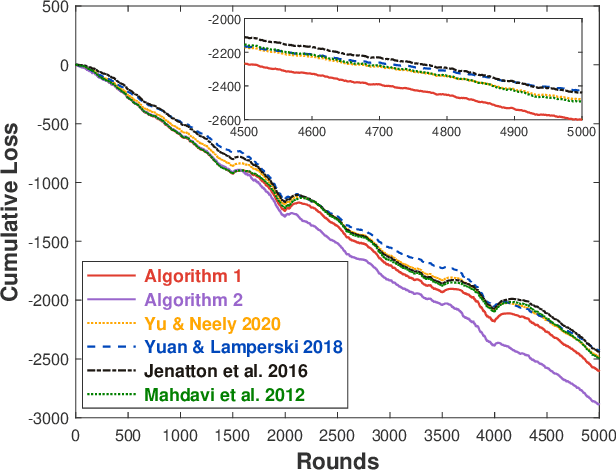
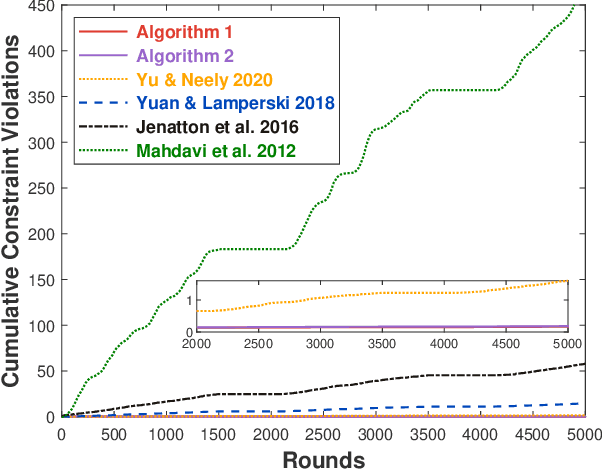
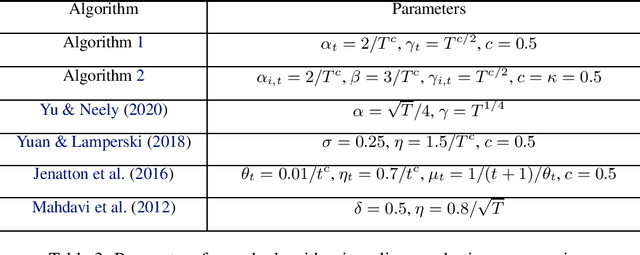
This paper considers distributed online convex optimization with adversarial constraints. In this setting, a network of agents makes decisions at each round, and then only a portion of the loss function and a coordinate block of the constraint function are privately revealed to each agent. The loss and constraint functions are convex and can vary arbitrarily across rounds. The agents collaborate to minimize network regret and cumulative constraint violation. A novel distributed online algorithm is proposed and it achieves an $\mathcal{O}(T^{\max\{c,1-c\}})$ network regret bound and an $\mathcal{O}(T^{1-c/2})$ network cumulative constraint violation bound, where $T$ is the number of rounds and $c\in(0,1)$ is a user-defined trade-off parameter. When Slater's condition holds (i.e, there is a point that strictly satisfies the inequality constraints), the network cumulative constraint violation bound is reduced to $\mathcal{O}(T^{1-c})$. Moreover, if the loss functions are strongly convex, then the network regret bound is reduced to $\mathcal{O}(\log(T))$, and the network cumulative constraint violation bound is reduced to $\mathcal{O}(\sqrt{\log(T)T})$ and $\mathcal{O}(\log(T))$ without and with Slater's condition, respectively. To the best of our knowledge, this paper is the first to achieve reduced (network) cumulative constraint violation bounds for (distributed) online convex optimization with adversarial constraints under Slater's condition. Finally, the theoretical results are verified through numerical simulations.
A Generalized Multi-Modal Fusion Detection Framework
Mar 13, 2023LiDAR point clouds have become the most common data source in autonomous driving. However, due to the sparsity of point clouds, accurate and reliable detection cannot be achieved in specific scenarios. Because of their complementarity with point clouds, images are getting increasing attention. Although with some success, existing fusion methods either perform hard fusion or do not fuse in a direct manner. In this paper, we propose a generic 3D detection framework called MMFusion, using multi-modal features. The framework aims to achieve accurate fusion between LiDAR and images to improve 3D detection in complex scenes. Our framework consists of two separate streams: the LiDAR stream and the camera stream, which can be compatible with any single-modal feature extraction network. The Voxel Local Perception Module in the LiDAR stream enhances local feature representation, and then the Multi-modal Feature Fusion Module selectively combines feature output from different streams to achieve better fusion. Extensive experiments have shown that our framework not only outperforms existing benchmarks but also improves their detection, especially for detecting cyclists and pedestrians on KITTI benchmarks, with strong robustness and generalization capabilities. Hopefully, our work will stimulate more research into multi-modal fusion for autonomous driving tasks.
A Survey of Decision Making in Adversarial Games
Jul 16, 2022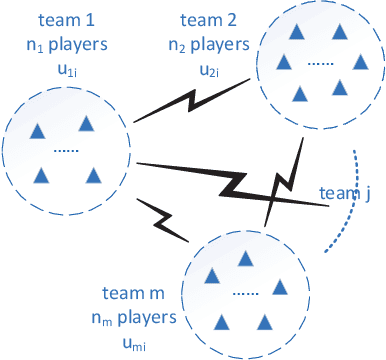
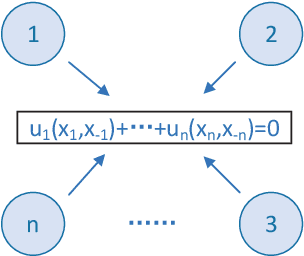
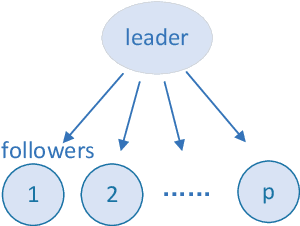
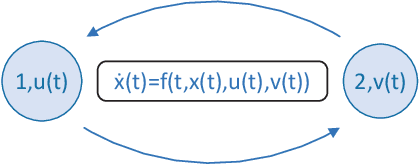
Game theory has by now found numerous applications in various fields, including economics, industry, jurisprudence, and artificial intelligence, where each player only cares about its own interest in a noncooperative or cooperative manner, but without obvious malice to other players. However, in many practical applications, such as poker, chess, evader pursuing, drug interdiction, coast guard, cyber-security, and national defense, players often have apparently adversarial stances, that is, selfish actions of each player inevitably or intentionally inflict loss or wreak havoc on other players. Along this line, this paper provides a systematic survey on three main game models widely employed in adversarial games, i.e., zero-sum normal-form and extensive-form games, Stackelberg (security) games, zero-sum differential games, from an array of perspectives, including basic knowledge of game models, (approximate) equilibrium concepts, problem classifications, research frontiers, (approximate) optimal strategy seeking techniques, prevailing algorithms, and practical applications. Finally, promising future research directions are also discussed for relevant adversarial games.
A Survey of Decentralized Online Learning
May 01, 2022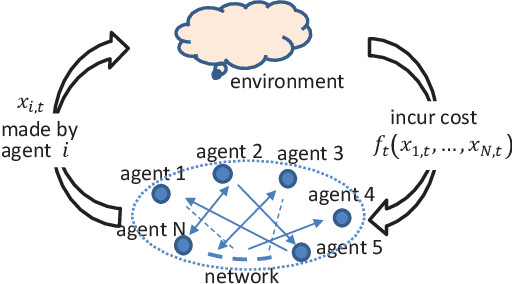
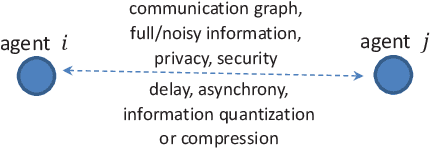
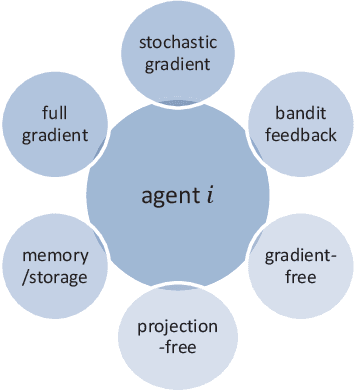
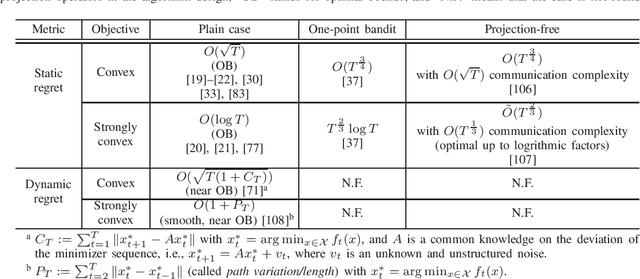
Decentralized online learning (DOL) has been increasingly researched in the last decade, mostly motivated by its wide applications in sensor networks, commercial buildings, robotics (e.g., decentralized target tracking and formation control), smart grids, deep learning, and so forth. In this problem, there are a network of agents who may be cooperative (i.e., decentralized online optimization) or noncooperative (i.e., online game) through local information exchanges, and the local cost function of each agent is often time-varying in dynamic and even adversarial environments. At each time, a decision must be made by each agent based on historical information at hand without knowing future information on cost functions. Although this problem has been extensively studied in the last decade, a comprehensive survey is lacking. Therefore, this paper provides a thorough overview of DOL from the perspective of problem settings, communication, computation, and performances. In addition, some potential future directions are also discussed in details.
On Faster Convergence of Scaled Sign Gradient Descent
Sep 04, 2021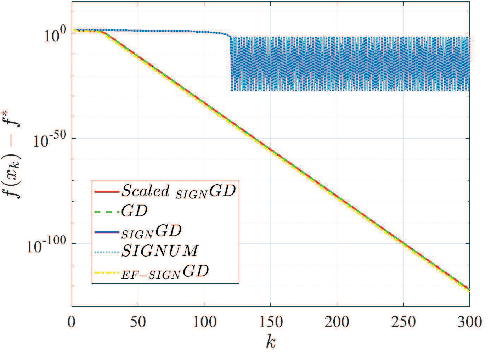
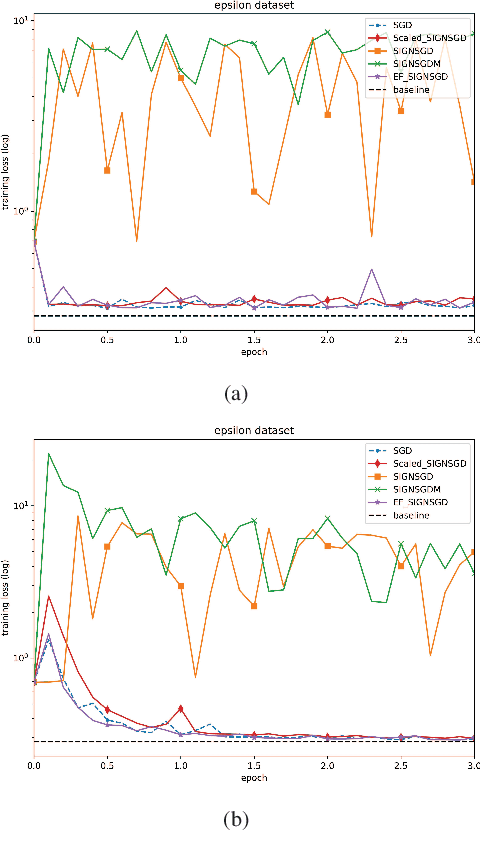
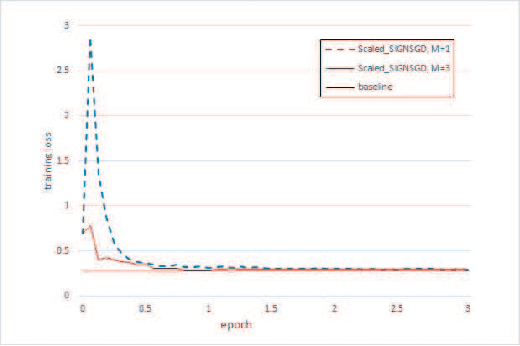
Communication has been seen as a significant bottleneck in industrial applications over large-scale networks. To alleviate the communication burden, sign-based optimization algorithms have gained popularity recently in both industrial and academic communities, which is shown to be closely related to adaptive gradient methods, such as Adam. Along this line, this paper investigates faster convergence for a variant of sign-based gradient descent, called scaled signGD, in three cases: 1) the objective function is strongly convex; 2) the objective function is nonconvex but satisfies the Polyak-Lojasiewicz (PL) inequality; 3) the gradient is stochastic, called scaled signGD in this case. For the first two cases, it can be shown that the scaled signGD converges at a linear rate. For case 3), the algorithm is shown to converge linearly to a neighborhood of the optimal value when a constant learning rate is employed, and the algorithm converges at a rate of $O(1/k)$ when using a diminishing learning rate, where $k$ is the iteration number. The results are also extended to the distributed setting by majority vote in a parameter-server framework. Finally, numerical experiments on logistic regression are performed to corroborate the theoretical findings.
Composition and Application of Current Advanced Driving Assistance System: A Review
Jun 10, 2021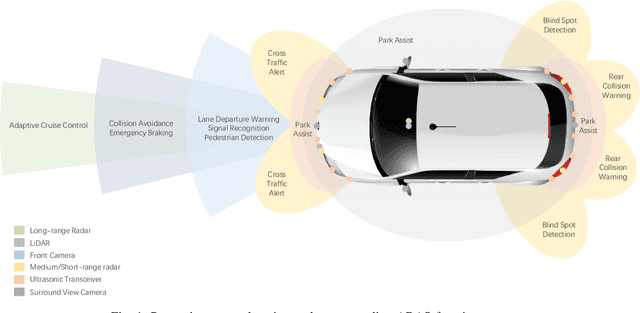
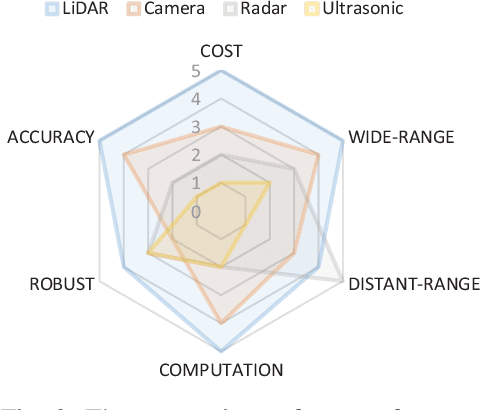
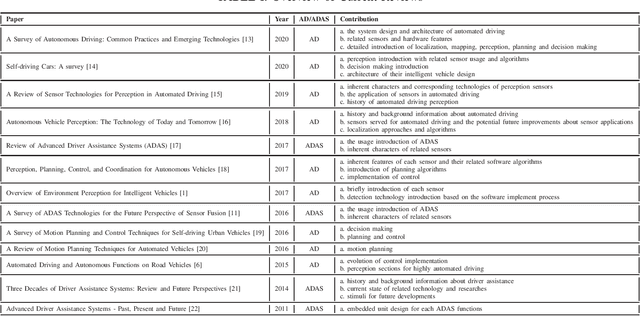
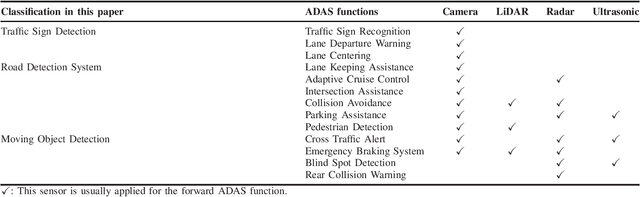
Due to the growing awareness of driving safety and the development of sophisticated technologies, advanced driving assistance system (ADAS) has been equipped in more and more vehicles with higher accuracy and lower price. The latest progress in this field has called for a review to sum up the conventional knowledge of ADAS, the state-of-the-art researches, and novel applications in real-world. With the help of this kind of review, newcomers in this field can get basic knowledge easier and other researchers may be inspired with potential future development possibility. This paper makes a general introduction about ADAS by analyzing its hardware support and computation algorithms. Different types of perception sensors are introduced from their interior feature classifications, installation positions, supporting ADAS functions, and pros and cons. The comparisons between different sensors are concluded and illustrated from their inherent characters and specific usages serving for each ADAS function. The current algorithms for ADAS functions are also collected and briefly presented in this paper from both traditional methods and novel ideas. Additionally, discussions about the definition of ADAS from different institutes are reviewed in this paper, and future approaches about ADAS in China are introduced in particular.
Regret and Cumulative Constraint Violation Analysis for Online Convex Optimization with Long Term Constraints
Jun 09, 2021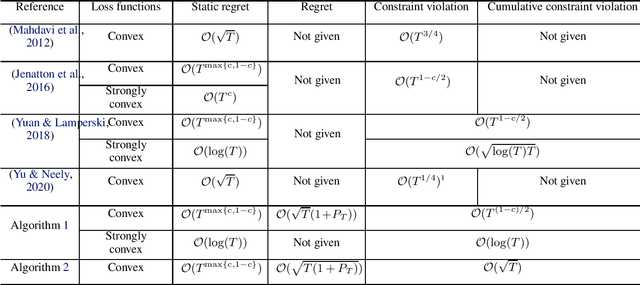
This paper considers online convex optimization with long term constraints, where constraints can be violated in intermediate rounds, but need to be satisfied in the long run. The cumulative constraint violation is used as the metric to measure constraint violations, which excludes the situation that strictly feasible constraints can compensate the effects of violated constraints. A novel algorithm is first proposed and it achieves an $\mathcal{O}(T^{\max\{c,1-c\}})$ bound for static regret and an $\mathcal{O}(T^{(1-c)/2})$ bound for cumulative constraint violation, where $c\in(0,1)$ is a user-defined trade-off parameter, and thus has improved performance compared with existing results. Both static regret and cumulative constraint violation bounds are reduced to $\mathcal{O}(\log(T))$ when the loss functions are strongly convex, which also improves existing results. %In order to bound the regret with respect to any comparator sequence, In order to achieve the optimal regret with respect to any comparator sequence, another algorithm is then proposed and it achieves the optimal $\mathcal{O}(\sqrt{T(1+P_T)})$ regret and an $\mathcal{O}(\sqrt{T})$ cumulative constraint violation, where $P_T$ is the path-length of the comparator sequence. Finally, numerical simulations are provided to illustrate the effectiveness of the theoretical results.