 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCar-GS: Addressing Reflective and Transparent Surface Challenges in 3D Car Reconstruction
Jan 19, 2025



3D car modeling is crucial for applications in autonomous driving systems, virtual and augmented reality, and gaming. However, due to the distinctive properties of cars, such as highly reflective and transparent surface materials, existing methods often struggle to achieve accurate 3D car reconstruction.To address these limitations, we propose Car-GS, a novel approach designed to mitigate the effects of specular highlights and the coupling of RGB and geometry in 3D geometric and shading reconstruction (3DGS). Our method incorporates three key innovations: First, we introduce view-dependent Gaussian primitives to effectively model surface reflections. Second, we identify the limitations of using a shared opacity parameter for both image rendering and geometric attributes when modeling transparent objects. To overcome this, we assign a learnable geometry-specific opacity to each 2D Gaussian primitive, dedicated solely to rendering depth and normals. Third, we observe that reconstruction errors are most prominent when the camera view is nearly orthogonal to glass surfaces. To address this issue, we develop a quality-aware supervision module that adaptively leverages normal priors from a pre-trained large-scale normal model.Experimental results demonstrate that Car-GS achieves precise reconstruction of car surfaces and significantly outperforms prior methods. The project page is available at https://lcc815.github.io/Car-GS.
RePaint-NeRF: NeRF Editting via Semantic Masks and Diffusion Models
Jun 09, 2023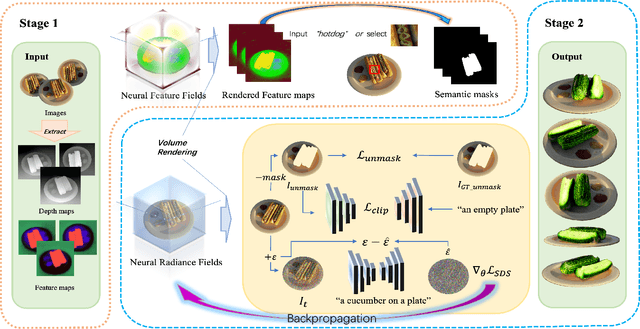
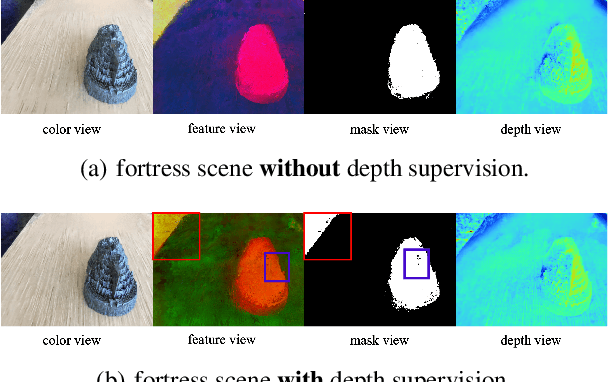
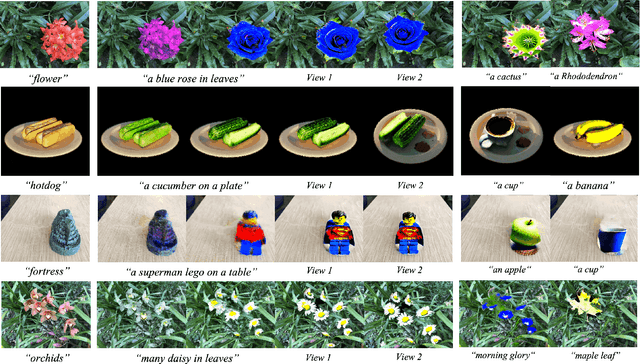
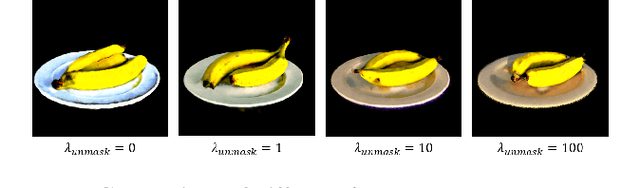
The emergence of Neural Radiance Fields (NeRF) has promoted the development of synthesized high-fidelity views of the intricate real world. However, it is still a very demanding task to repaint the content in NeRF. In this paper, we propose a novel framework that can take RGB images as input and alter the 3D content in neural scenes. Our work leverages existing diffusion models to guide changes in the designated 3D content. Specifically, we semantically select the target object and a pre-trained diffusion model will guide the NeRF model to generate new 3D objects, which can improve the editability, diversity, and application range of NeRF. Experiment results show that our algorithm is effective for editing 3D objects in NeRF under different text prompts, including editing appearance, shape, and more. We validate our method on both real-world datasets and synthetic-world datasets for these editing tasks. Please visit https://repaintnerf.github.io for a better view of our results.