 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnti-UAV: A Large Multi-Modal Benchmark for UAV Tracking
Feb 08, 2021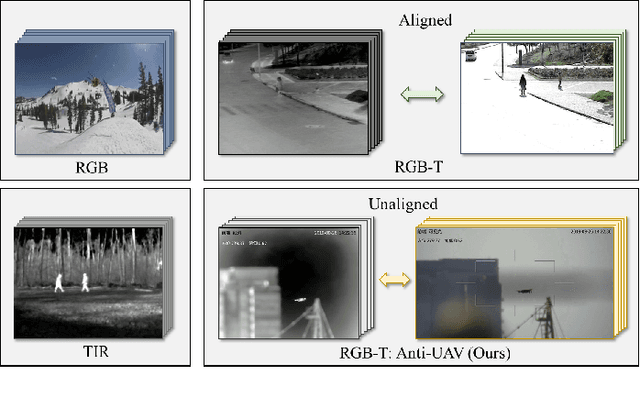
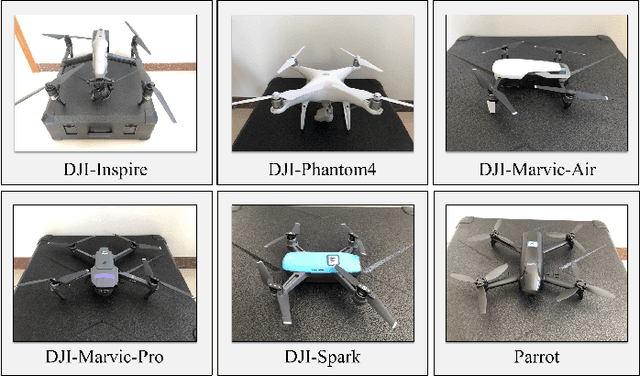

Unmanned Aerial Vehicle (UAV) offers lots of applications in both commerce and recreation. With this, monitoring the operation status of UAVs is crucially important. In this work, we consider the task of tracking UAVs, providing rich information such as location and trajectory. To facilitate research on this topic, we propose a dataset, Anti-UAV, with more than 300 video pairs containing over 580k manually annotated bounding boxes. The releasing of such a large-scale dataset could be a useful initial step in research of tracking UAVs. Furthermore, the advancement of addressing research challenges in Anti-UAV can help the design of anti-UAV systems, leading to better surveillance of UAVs. Besides, a novel approach named dual-flow semantic consistency (DFSC) is proposed for UAV tracking. Modulated by the semantic flow across video sequences, the tracker learns more robust class-level semantic information and obtains more discriminative instance-level features. Experimental results demonstrate that Anti-UAV is very challenging, and the proposed method can effectively improve the tracker's performance. The Anti-UAV benchmark and the code of the proposed approach will be publicly available at https://github.com/ucas-vg/Anti-UAV.
SM+: Refined Scale Match for Tiny Person Detection
Feb 06, 2021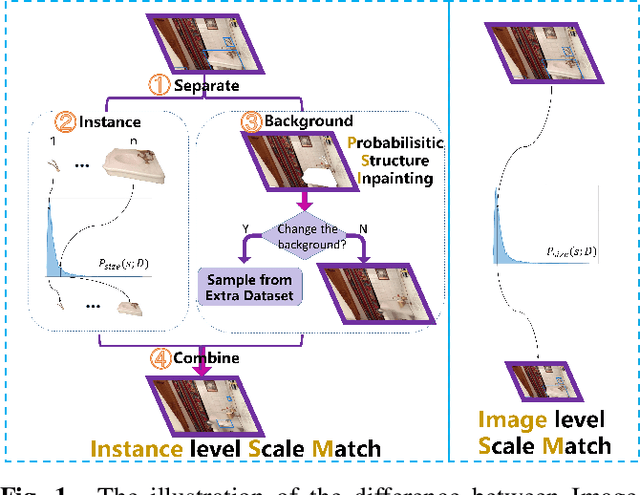
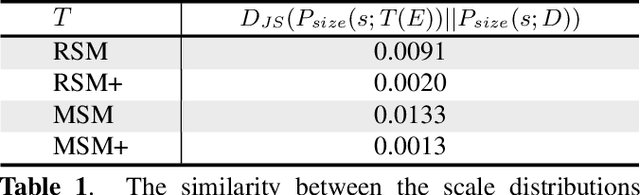
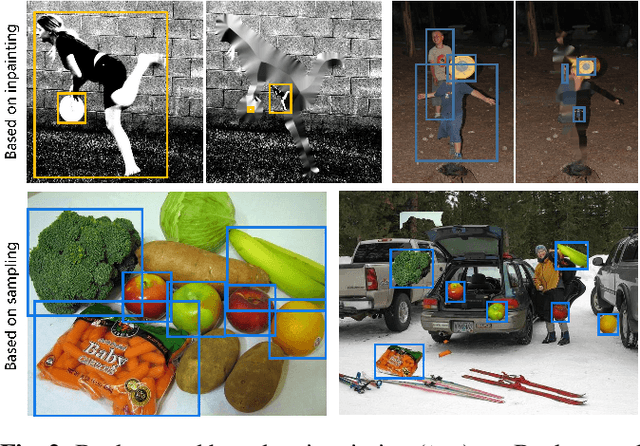
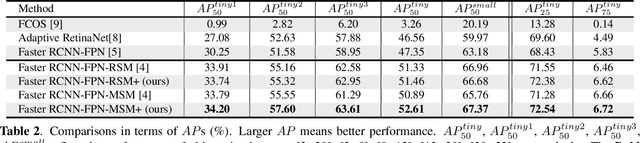
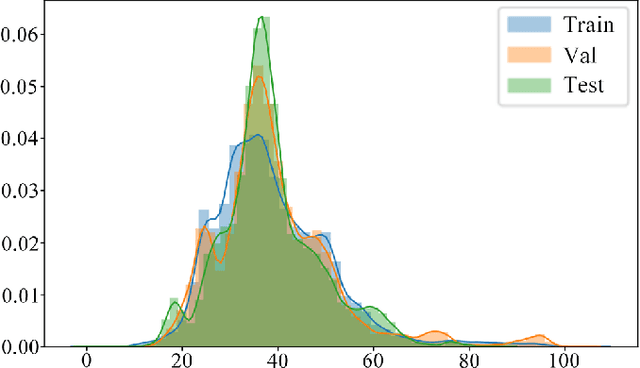
Detecting tiny objects ( e.g., less than 20 x 20 pixels) in large-scale images is an important yet open problem. Modern CNN-based detectors are challenged by the scale mismatch between the dataset for network pre-training and the target dataset for detector training. In this paper, we investigate the scale alignment between pre-training and target datasets, and propose a new refined Scale Match method (termed SM+) for tiny person detection. SM+ improves the scale match from image level to instance level, and effectively promotes the similarity between pre-training and target dataset. Moreover, considering SM+ possibly destroys the image structure, a new probabilistic structure inpainting (PSI) method is proposed for the background processing. Experiments conducted across various detectors show that SM+ noticeably improves the performance on TinyPerson, and outperforms the state-of-the-art detectors with a significant margin.
Effective Fusion Factor in FPN for Tiny Object Detection
Nov 09, 2020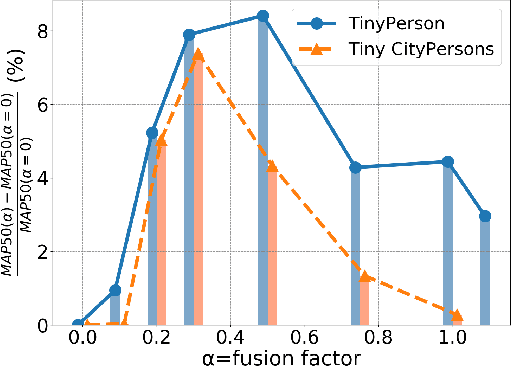
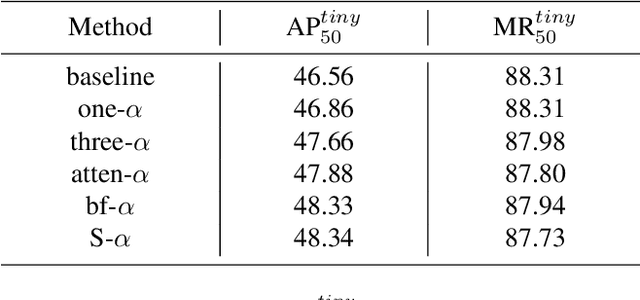
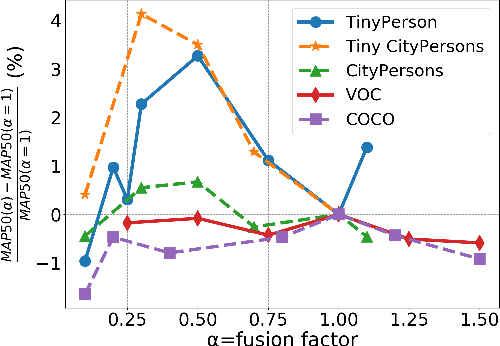
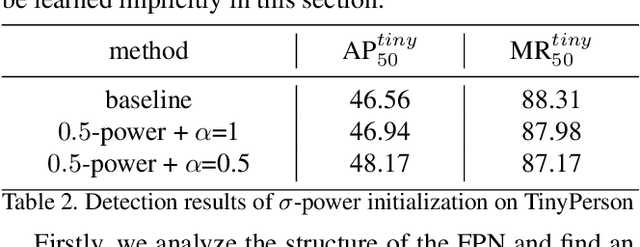
FPN-based detectors have made significant progress in general object detection, e.g., MS COCO and PASCAL VOC. However, these detectors fail in certain application scenarios, e.g., tiny object detection. In this paper, we argue that the top-down connections between adjacent layers in FPN bring two-side influences for tiny object detection, not only positive. We propose a novel concept, fusion factor, to control information that deep layers deliver to shallow layers, for adapting FPN to tiny object detection. After series of experiments and analysis, we explore how to estimate an effective value of fusion factor for a particular dataset by a statistical method. The estimation is dependent on the number of objects distributed in each layer. Comprehensive experiments are conducted on tiny object detection datasets, e.g., TinyPerson and Tiny CityPersons. Our results show that when configuring FPN with a proper fusion factor, the network is able to achieve significant performance gains over the baseline on tiny object detection datasets. Codes and models will be released.