 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimple Additions, Substantial Gains: Expanding Scripts, Languages, and Lineage Coverage in URIEL+
Oct 31, 2025



The URIEL+ linguistic knowledge base supports multilingual research by encoding languages through geographic, genetic, and typological vectors. However, data sparsity remains prevalent, in the form of missing feature types, incomplete language entries, and limited genealogical coverage. This limits the usefulness of URIEL+ in cross-lingual transfer, particularly for supporting low-resource languages. To address this sparsity, this paper extends URIEL+ with three contributions: introducing script vectors to represent writing system properties for 7,488 languages, integrating Glottolog to add 18,710 additional languages, and expanding lineage imputation for 26,449 languages by propagating typological and script features across genealogies. These additions reduce feature sparsity by 14% for script vectors, increase language coverage by up to 19,015 languages (1,007%), and improve imputation quality metrics by up to 33%. Our benchmark on cross-lingual transfer tasks (oriented around low-resource languages) shows occasionally divergent performance compared to URIEL+, with performance gains up to 6% in certain setups. Our advances make URIEL+ more complete and inclusive for multilingual research.
Modality Matching Matters: Calibrating Language Distances for Cross-Lingual Transfer in URIEL+
Oct 22, 2025Existing linguistic knowledge bases such as URIEL+ provide valuable geographic, genetic and typological distances for cross-lingual transfer but suffer from two key limitations. One, their one-size-fits-all vector representations are ill-suited to the diverse structures of linguistic data, and two, they lack a principled method for aggregating these signals into a single, comprehensive score. In this paper, we address these gaps by introducing a framework for type-matched language distances. We propose novel, structure-aware representations for each distance type: speaker-weighted distributions for geography, hyperbolic embeddings for genealogy, and a latent variables model for typology. We unify these signals into a robust, task-agnostic composite distance. In selecting transfer languages, our representations and composite distances consistently improve performance across a wide range of NLP tasks, providing a more principled and effective toolkit for multilingual research.
ZSL-RPPO: Zero-Shot Learning for Quadrupedal Locomotion in Challenging Terrains using Recurrent Proximal Policy Optimization
Mar 04, 2024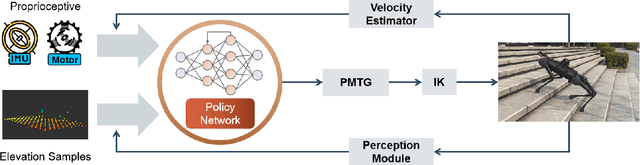
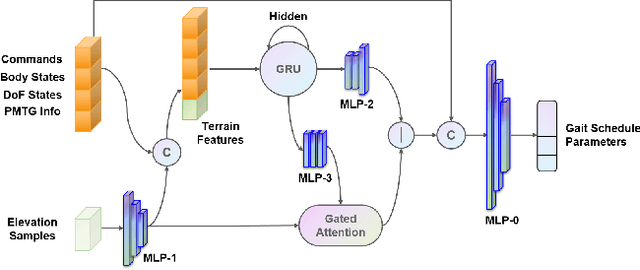
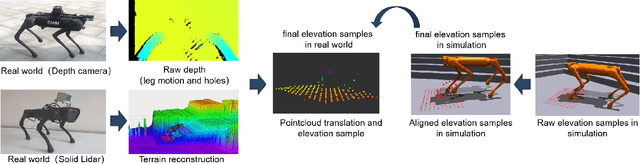
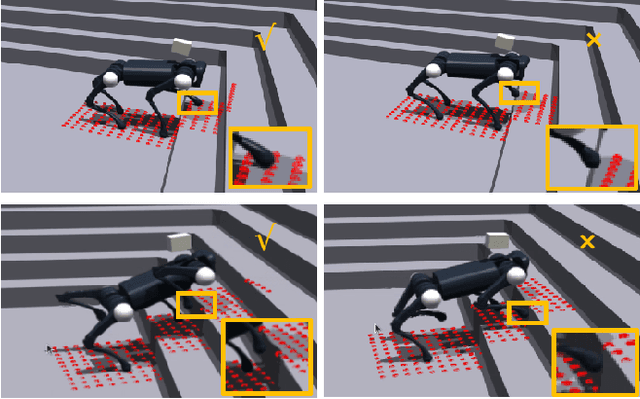
We present ZSL-RPPO, an improved zero-shot learning architecture that overcomes the limitations of teacher-student neural networks and enables generating robust, reliable, and versatile locomotion for quadrupedal robots in challenging terrains. We propose a new algorithm RPPO (Recurrent Proximal Policy Optimization) that directly trains recurrent neural network in partially observable environments and results in more robust training using domain randomization. Our locomotion controller supports extensive perturbation across simulation-to-reality transfer for both intrinsic and extrinsic physical parameters without further fine-tuning. This can avoid the significant decline of student's performance during simulation-to-reality transfer and therefore enhance the robustness and generalization of the locomotion controller. We deployed our controller on the Unitree A1 and Aliengo robots in real environment and exteroceptive perception is provided by either a solid-state Lidar or a depth camera. Our locomotion controller was tested in various challenging terrains like slippery surfaces, Grassy Terrain, and stairs. Our experiment results and comparison show that our approach significantly outperforms the state-of-the-art.