 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking TinyML Systems: Challenges and Direction
Mar 10, 2020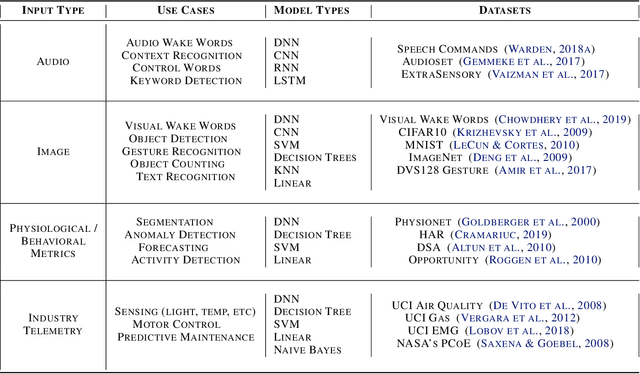
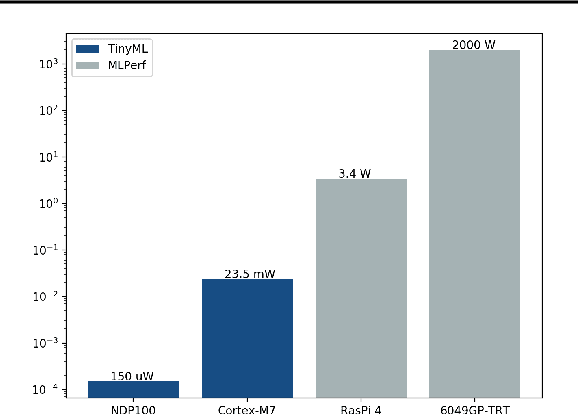
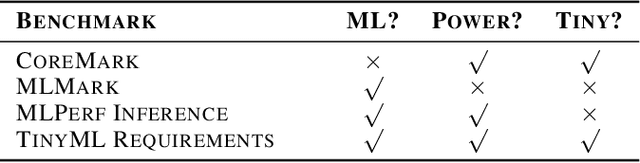
Recent advancements in ultra-low-power machine learning (TinyML) hardware promises to unlock an entirely new class of smart applications. However, continued progress is limited by the lack of a widely accepted benchmark for these systems. Benchmarking allows us to measure and thereby systematically compare, evaluate, and improve the performance of systems. In this position paper, we present the current landscape of TinyML and discuss the challenges and direction towards developing a fair and useful hardware benchmark for TinyML workloads. Our viewpoints reflect the collective thoughts of the TinyMLPerf working group that is comprised of 30 organizations.
Learning to Seek: Autonomous Source Seeking with Deep Reinforcement Learning Onboard a Nano Drone Microcontroller
Sep 29, 2019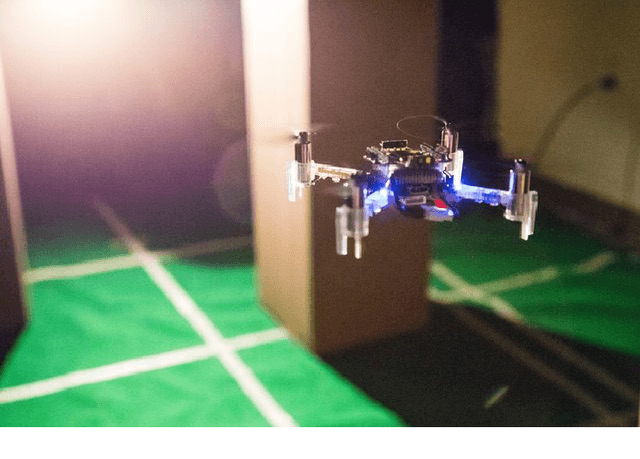
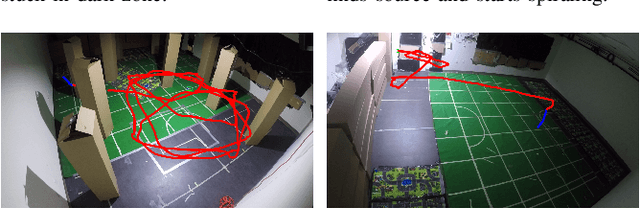
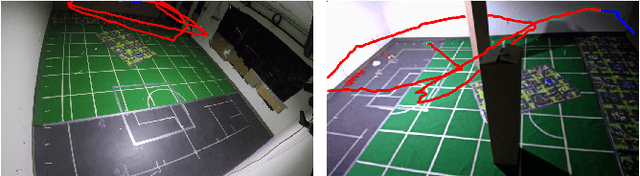
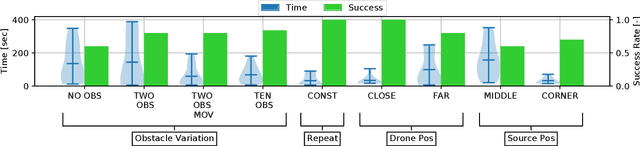
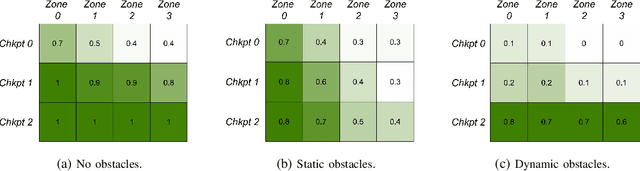
Fully autonomous navigation using nano drones has numerous applications in the real world, ranging from search and rescue to source seeking. Nano drones are well-suited for source seeking because of their agility, low price, and ubiquitous character. Unfortunately, their constrained form factor limits flight time, sensor payload, and compute capability. These challenges are a crucial limitation for the use of source-seeking nano drones in GPS-denied and highly cluttered environments. Hereby, we introduce a fully autonomous deep reinforcement learning-based light-seeking nano drone. The 33-gram nano drone performs all computation on-board the ultra-low-power microcontroller (MCU). We present the method for efficiently training, converting, and utilizing deep reinforcement learning policies. Our training methodology and novel quantization scheme allow fitting the trained policy in 3 kB of memory. The quantization scheme uses representative input data and input scaling to arrive at a full 8-bit model. Finally, we evaluate the approach in simulation and flight tests using a Bitcraze CrazyFlie, achieving 80% success rate on average in a highly cluttered and randomized test environment. Even more, the drone finds the light source in 29% fewer steps compared to a baseline simulation (obstacle avoidance without source information). To our knowledge, this is the first deep reinforcement learning method that enables source seeking within a highly constrained nano drone demonstrating robust flight behavior. Our general methodology is suitable for any (source seeking) highly constrained platform using deep reinforcement learning.
Air Learning: An AI Research Platform for Algorithm-Hardware Benchmarking of Autonomous Aerial Robots
Jun 09, 2019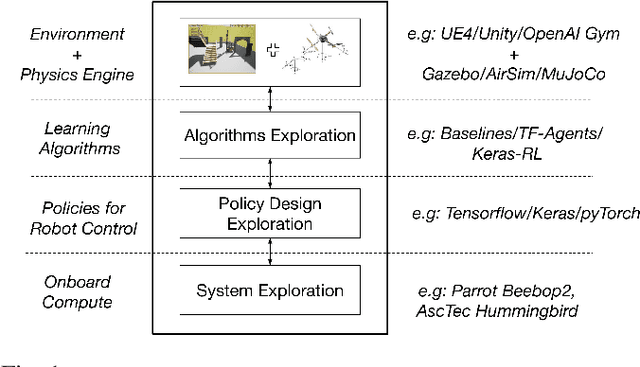

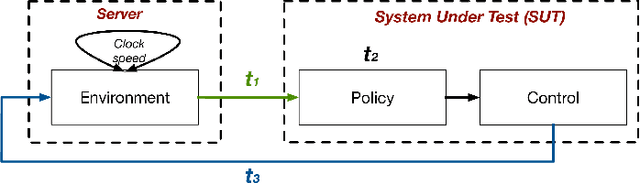
We introduce Air Learning, an AI research platform for benchmarking algorithm-hardware performance and energy efficiency trade-offs. We focus in particular on deep reinforcement learning (RL) interactions in autonomous unmanned aerial vehicles (UAVs). Equipped with a random environment generator, AirLearning exposes a UAV to a diverse set of challenging scenarios. Users can specify a task, train different RL policies and evaluate their performance and energy efficiency on a variety of hardware platforms. To show how Air Learning can be used, we seed it with Deep Q Networks (DQN) and Proximal Policy Optimization (PPO) to solve a point-to-point obstacle avoidance task in three different environments, generated using our configurable environment generator. We train the two algorithms using curriculum learning and non-curriculum-learning. Air Learning assesses the trained policies' performance, under a variety of quality-of-flight (QoF) metrics, such as the energy consumed, endurance and the average trajectory length, on resource-constrained embedded platforms like a Ras-Pi. We find that the trajectories on an embedded Ras-Pi are vastly different from those predicted on a high-end desktop system, resulting in up to 79.43% longer trajectories in one of the environments. To understand the source of such differences, we use Air Learning to artificially degrade desktop performance to mimic what happens on a low-end embedded system. QoF metrics with hardware-in-the-loop characterize those differences and expose how the choice of onboard compute affects the aerial robot's performance. We also conduct reliability studies to demonstrate how Air Learning can help understand how sensor failures affect the learned policies. All put together, Air Learning enables a broad class of RL studies on UAVs. More information and code for Air Learning can be found here: http://bit.ly/2JNAVb6.