 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecurity in the Fine-Tuning Lifecycle of Large Language Models: Threats, Defenses,Evaluation, and Future Directions
May 24, 2026Background: Fine-tuning is central to adapting pre-trained Large Language Models (LLMs) to downstream tasks, but its reliance on training data, parameter updates, and reusable components opens entry points for attackers. Threats have evolved from data poisoning and weight tampering to agent manipulation and interface exploitation, yet existing reviews lack a unified framework spanning the full fine-tuning lifecycle. Objective: This paper presents a systematic survey of LLM fine-tuning security and establishes a lifecycle-based framework for comparing attacks and defenses, complemented by unified empirical evaluation. Methods: We divide attack and defense mechanisms into three phases by intervention timing: pre-tuning, during-tuning, and post-tuning. Within each phase, strategies are reviewed and contrasted to expose their evolution and limitations. Representative methods are then evaluated under a unified model, hardware, and protocol setup, with cross-phase experiments pairing attacks and defenses from different phases. Results: Attack effectiveness is highly model-dependent and non-monotonic with scale: weight-editing attacks effective on earlier models lose impact on modern open-source LLMs; cross-lingual backdoor transfer, reported as near-perfect at larger scales, fails entirely on tested 1B-4B models; and purely benign samples can compromise safety alignment in instruction-tuned models. Single-phase defenses rarely generalize across phases, and defense effectiveness depends jointly on model architecture and alignment state. Conclusion: We identify key open problems (configuration-robust defense, cross-phase defense composition, and embedding-space attacks beyond behavioral assumptions) and propose concrete future research directions.
FoMo4Wheat: Toward reliable crop vision foundation models with globally curated data
Sep 08, 2025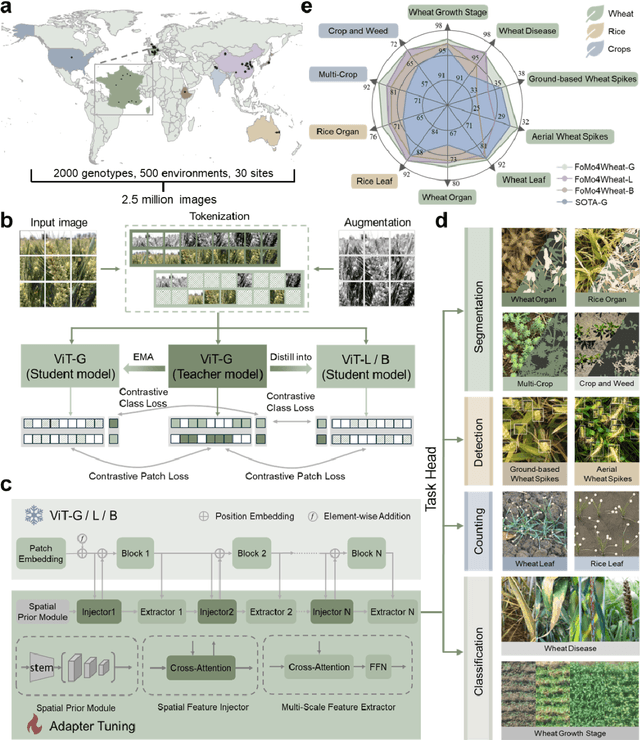
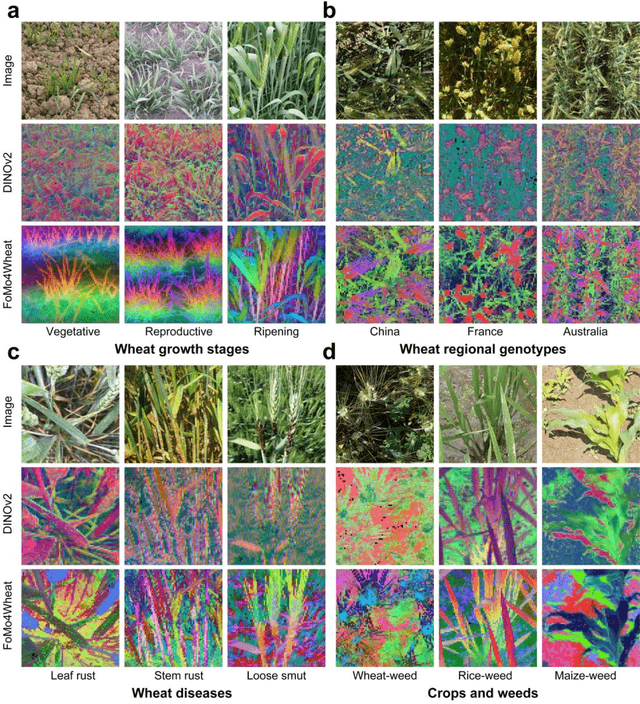
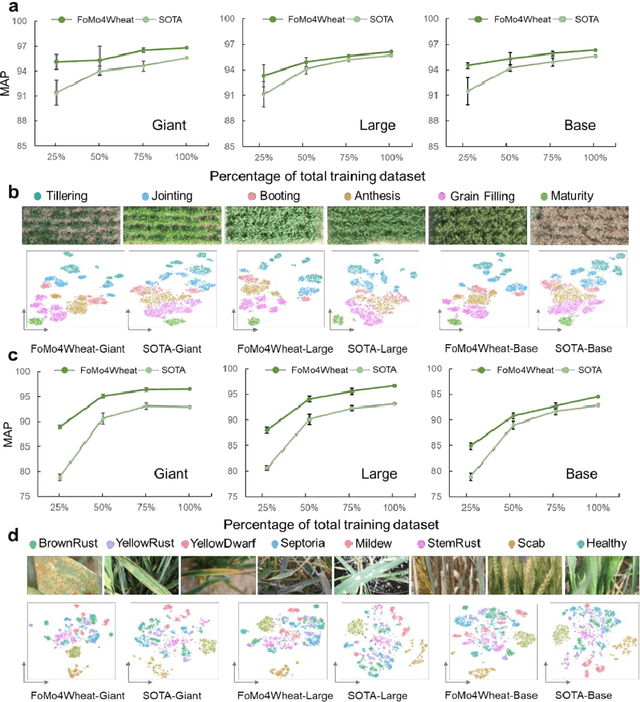
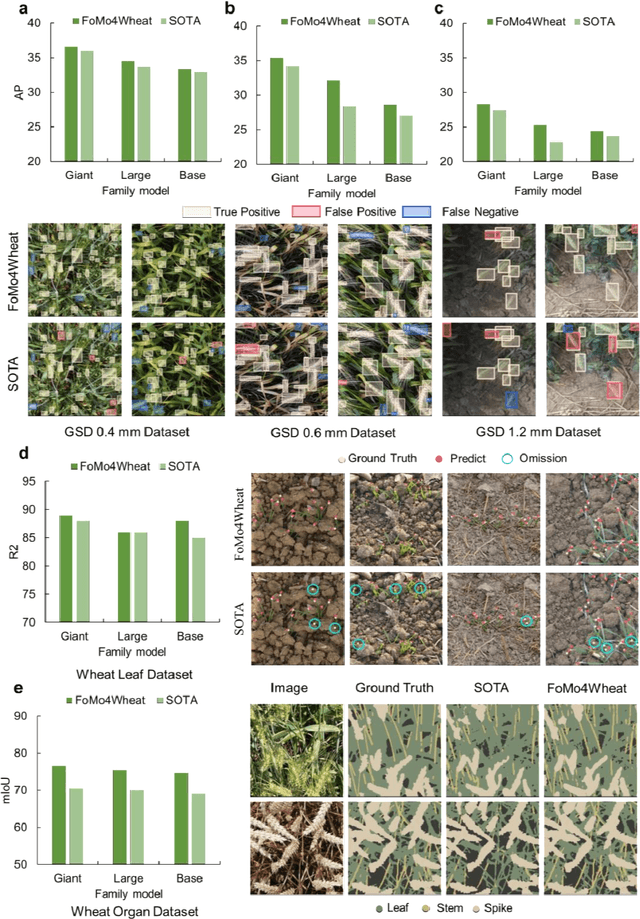
Vision-driven field monitoring is central to digital agriculture, yet models built on general-domain pretrained backbones often fail to generalize across tasks, owing to the interaction of fine, variable canopy structures with fluctuating field conditions. We present FoMo4Wheat, one of the first crop-domain vision foundation model pretrained with self-supervision on ImAg4Wheat, the largest and most diverse wheat image dataset to date (2.5 million high-resolution images collected over a decade at 30 global sites, spanning >2,000 genotypes and >500 environmental conditions). This wheat-specific pretraining yields representations that are robust for wheat and transferable to other crops and weeds. Across ten in-field vision tasks at canopy and organ levels, FoMo4Wheat models consistently outperform state-of-the-art models pretrained on general-domain dataset. These results demonstrate the value of crop-specific foundation models for reliable in-field perception and chart a path toward a universal crop foundation model with cross-species and cross-task capabilities. FoMo4Wheat models and the ImAg4Wheat dataset are publicly available online: https://github.com/PheniX-Lab/FoMo4Wheat and https://huggingface.co/PheniX-Lab/FoMo4Wheat. The demonstration website is: https://fomo4wheat.phenix-lab.com/.
Integer Binary-Range Alignment Neuron for Spiking Neural Networks
Jun 06, 2025Spiking Neural Networks (SNNs) are noted for their brain-like computation and energy efficiency, but their performance lags behind Artificial Neural Networks (ANNs) in tasks like image classification and object detection due to the limited representational capacity. To address this, we propose a novel spiking neuron, Integer Binary-Range Alignment Leaky Integrate-and-Fire to exponentially expand the information expression capacity of spiking neurons with only a slight energy increase. This is achieved through Integer Binary Leaky Integrate-and-Fire and range alignment strategy. The Integer Binary Leaky Integrate-and-Fire allows integer value activation during training and maintains spike-driven dynamics with binary conversion expands virtual timesteps during inference. The range alignment strategy is designed to solve the spike activation limitation problem where neurons fail to activate high integer values. Experiments show our method outperforms previous SNNs, achieving 74.19% accuracy on ImageNet and 66.2% mAP@50 and 49.1% mAP@50:95 on COCO, surpassing previous bests with the same architecture by +3.45% and +1.6% and +1.8%, respectively. Notably, our SNNs match or exceed ANNs' performance with the same architecture, and the energy efficiency is improved by 6.3${\times}$.
A General Neural Network Potential for Energetic Materials with C, H, N, and O elements
Mar 03, 2025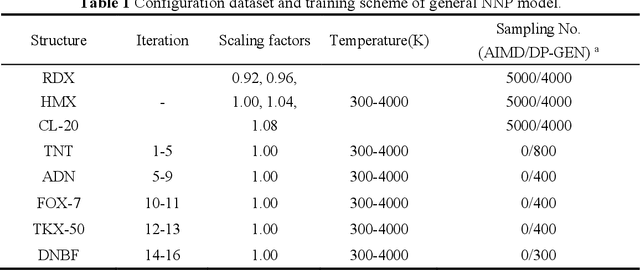
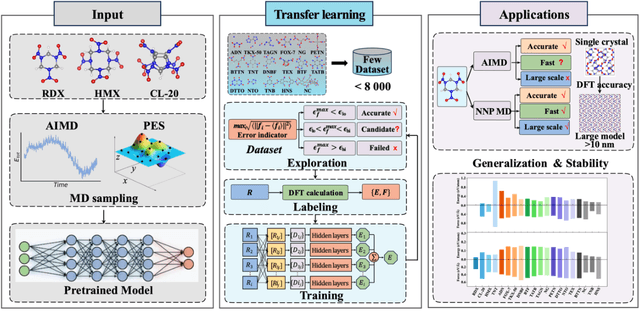
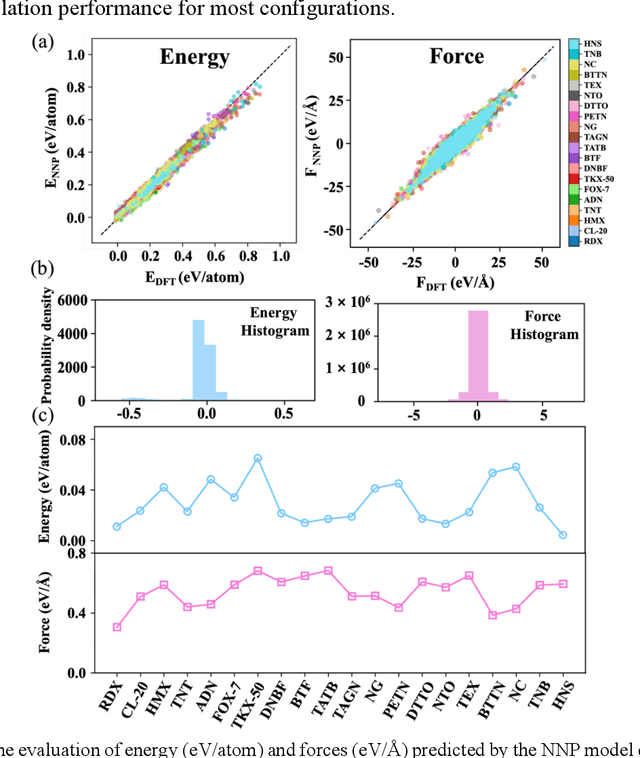
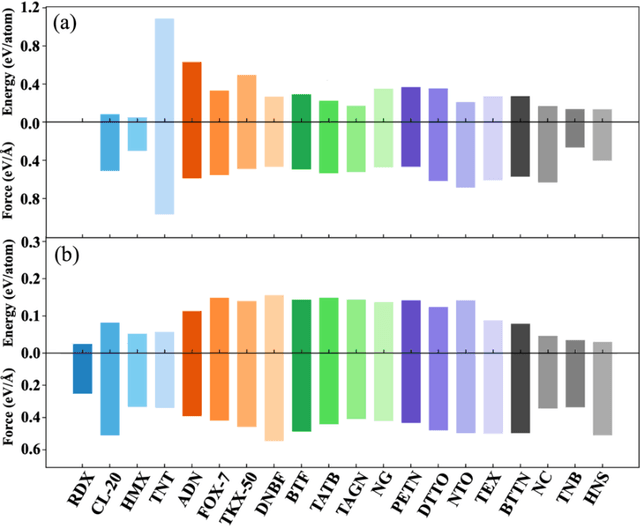
The discovery and optimization of high-energy materials (HEMs) are constrained by the prohibitive computational expense and prolonged development cycles inherent in conventional approaches. In this work, we develop a general neural network potential (NNP) that efficiently predicts the structural, mechanical, and decomposition properties of HEMs composed of C, H, N, and O. Our framework leverages pre-trained NNP models, fine-tuned using transfer learning on energy and force data derived from density functional theory (DFT) calculations. This strategy enables rapid adaptation across 20 different HEM systems while maintaining DFT-level accuracy, significantly reducing computational costs. A key aspect of this work is the ability of NNP model to capture the chemical activity space of HEMs, accurately describe the key atomic interactions and reaction mechanisms during thermal decomposition. The general NNP model has been applied in molecular dynamics (MD) simulations and validated with experimental data for various HEM structures. Results show that the NNP model accurately predicts the structural, mechanical, and decomposition properties of HEMs by effectively describing their chemical activity space. Compared to traditional force fields, it offers superior DFT-level accuracy and generalization across both microscopic and macroscopic properties, reducing the computational and experimental costs. This work provides an efficient strategy for the design and development of HEMs and proposes a promising framework for integrating DFT, machine learning, and experimental methods in materials research. (To facilitate further research and practical applications, we open-source our NNP model on GitHub: https://github.com/MingjieWen/General-NNP-model-for-C-H-N-O-Energetic-Materials.)
Learning from Imperfect Demonstrations through Dynamics Evaluation
Dec 18, 2023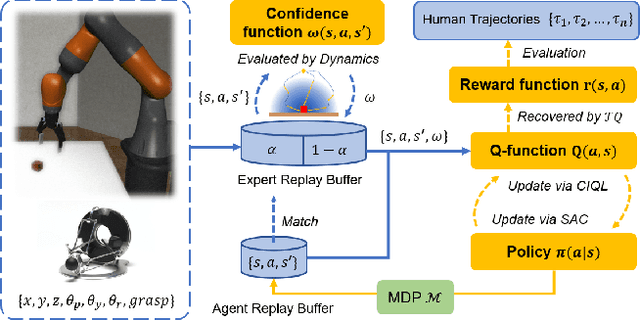
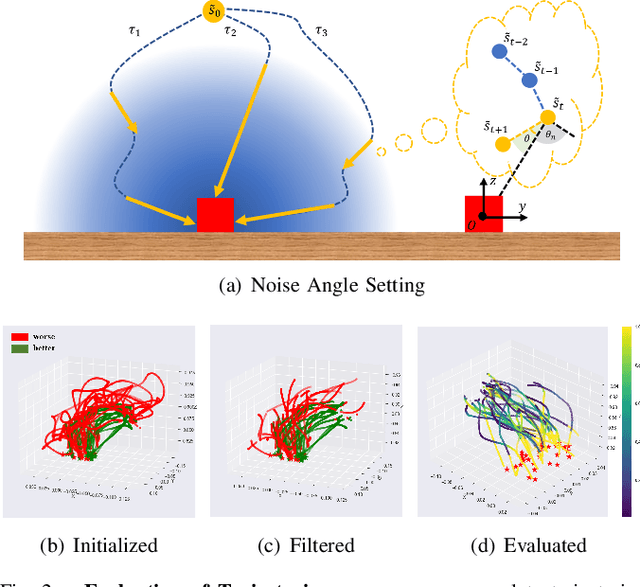
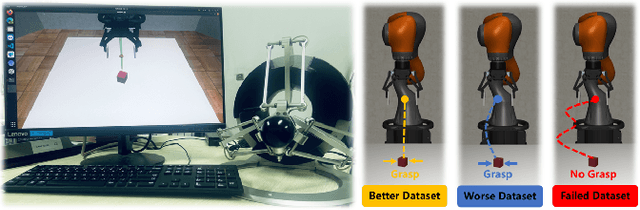
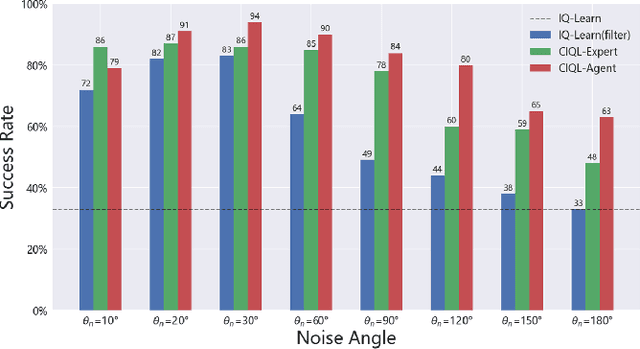
Standard imitation learning usually assumes that demonstrations are drawn from an optimal policy distribution. However, in real-world scenarios, every human demonstration may exhibit nearly random behavior and collecting high-quality human datasets can be quite costly. This requires imitation learning can learn from imperfect demonstrations to obtain robotic policies that align human intent. Prior work uses confidence scores to extract useful information from imperfect demonstrations, which relies on access to ground truth rewards or active human supervision. In this paper, we propose a dynamics-based method to evaluate the data confidence scores without above efforts. We develop a generalized confidence-based imitation learning framework called Confidence-based Inverse soft-Q Learning (CIQL), which can employ different optimal policy matching methods by simply changing object functions. Experimental results show that our confidence evaluation method can increase the success rate by $40.3\%$ over the original algorithm and $13.5\%$ over the simple noise filtering.