 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetaOcc: Surround-View 4D Radar and Camera Fusion Framework for 3D Occupancy Prediction with Dual Training Strategies
Jan 26, 2025



3D occupancy prediction is crucial for autonomous driving perception. Fusion of 4D radar and camera provides a potential solution of robust occupancy prediction on serve weather with least cost. How to achieve effective multi-modal feature fusion and reduce annotation costs remains significant challenges. In this work, we propose MetaOcc, a novel multi-modal occupancy prediction framework that fuses surround-view cameras and 4D radar for comprehensive environmental perception. We first design a height self-attention module for effective 3D feature extraction from sparse radar points. Then, a local-global fusion mechanism is proposed to adaptively capture modality contributions while handling spatio-temporal misalignments. Temporal alignment and fusion module is employed to further aggregate historical feature. Furthermore, we develop a semi-supervised training procedure leveraging open-set segmentor and geometric constraints for pseudo-label generation, enabling robust perception with limited annotations. Extensive experiments on OmniHD-Scenes dataset demonstrate that MetaOcc achieves state-of-the-art performance, surpassing previous methods by significant margins. Notably, as the first semi-supervised 4D radar and camera fusion-based occupancy prediction approach, MetaOcc maintains 92.5% of the fully-supervised performance while using only 50% of ground truth annotations, establishing a new benchmark for multi-modal 3D occupancy prediction. Code and data are available at https://github.com/LucasYang567/MetaOcc.
OmniHD-Scenes: A Next-Generation Multimodal Dataset for Autonomous Driving
Dec 14, 2024

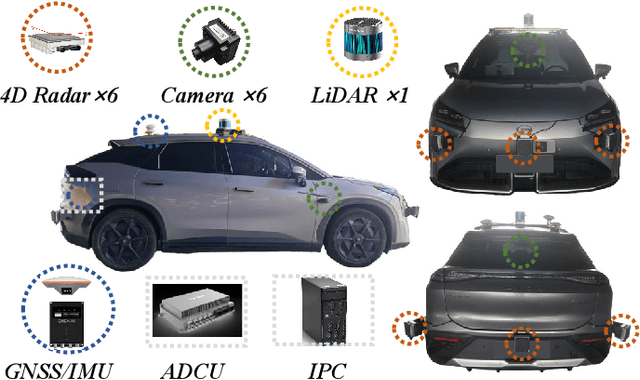
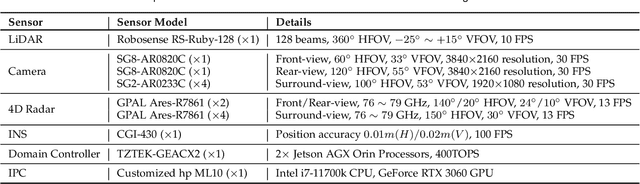
The rapid advancement of deep learning has intensified the need for comprehensive data for use by autonomous driving algorithms. High-quality datasets are crucial for the development of effective data-driven autonomous driving solutions. Next-generation autonomous driving datasets must be multimodal, incorporating data from advanced sensors that feature extensive data coverage, detailed annotations, and diverse scene representation. To address this need, we present OmniHD-Scenes, a large-scale multimodal dataset that provides comprehensive omnidirectional high-definition data. The OmniHD-Scenes dataset combines data from 128-beam LiDAR, six cameras, and six 4D imaging radar systems to achieve full environmental perception. The dataset comprises 1501 clips, each approximately 30-s long, totaling more than 450K synchronized frames and more than 5.85 million synchronized sensor data points. We also propose a novel 4D annotation pipeline. To date, we have annotated 200 clips with more than 514K precise 3D bounding boxes. These clips also include semantic segmentation annotations for static scene elements. Additionally, we introduce a novel automated pipeline for generation of the dense occupancy ground truth, which effectively leverages information from non-key frames. Alongside the proposed dataset, we establish comprehensive evaluation metrics, baseline models, and benchmarks for 3D detection and semantic occupancy prediction. These benchmarks utilize surround-view cameras and 4D imaging radar to explore cost-effective sensor solutions for autonomous driving applications. Extensive experiments demonstrate the effectiveness of our low-cost sensor configuration and its robustness under adverse conditions. Data will be released at https://www.2077ai.com/OmniHD-Scenes.