 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMatterChat: A Multi-Modal LLM for Material Science
Feb 18, 2025


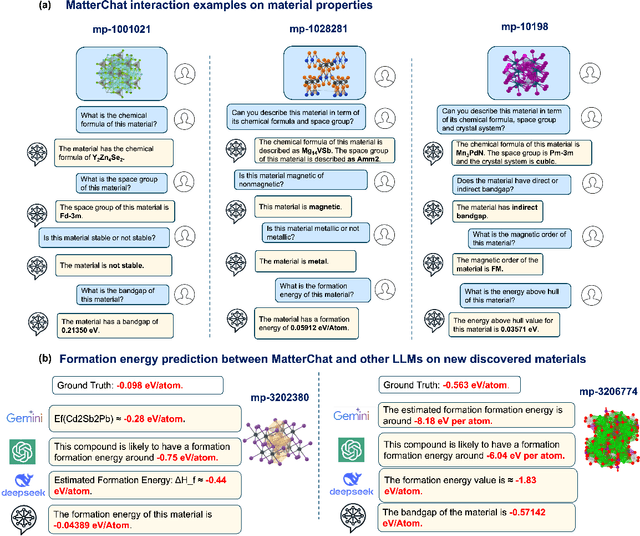
Understanding and predicting the properties of inorganic materials is crucial for accelerating advancements in materials science and driving applications in energy, electronics, and beyond. Integrating material structure data with language-based information through multi-modal large language models (LLMs) offers great potential to support these efforts by enhancing human-AI interaction. However, a key challenge lies in integrating atomic structures at full resolution into LLMs. In this work, we introduce MatterChat, a versatile structure-aware multi-modal LLM that unifies material structural data and textual inputs into a single cohesive model. MatterChat employs a bridging module to effectively align a pretrained machine learning interatomic potential with a pretrained LLM, reducing training costs and enhancing flexibility. Our results demonstrate that MatterChat significantly improves performance in material property prediction and human-AI interaction, surpassing general-purpose LLMs such as GPT-4. We also demonstrate its usefulness in applications such as more advanced scientific reasoning and step-by-step material synthesis.
Efficient Registration of Forest Point Clouds by Global Matching of Relative Stem Positions
Dec 23, 2021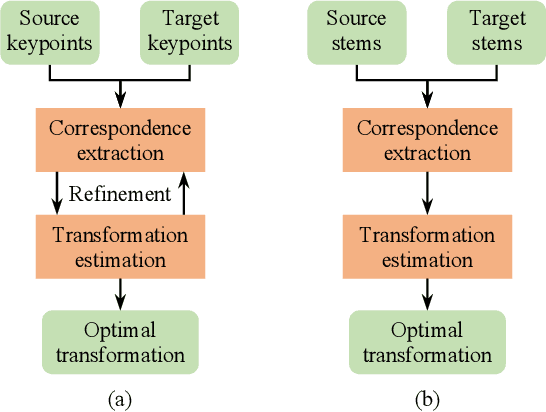

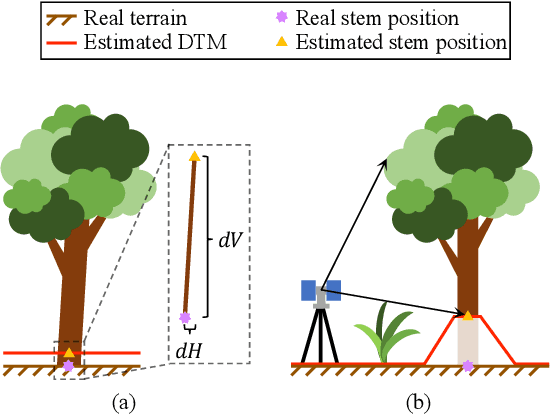
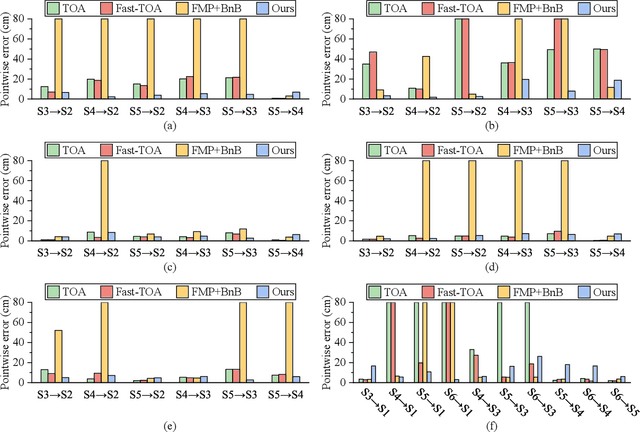
Registering point clouds of forest environments is an essential prerequisite for LiDAR applications in precision forestry. State-of-the-art methods for forest point cloud registration require the extraction of individual tree attributes, and they have an efficiency bottleneck when dealing with point clouds of real-world forests with dense trees. We propose an automatic, robust, and efficient method for the registration of forest point clouds. Our approach first locates tree stems from raw point clouds and then matches the stems based on their relative spatial relationship to determine the registration transformation. In contrast to existing methods, our algorithm requires no extra individual tree attributes and has linear complexity to the number of trees in the environment, allowing it to align point clouds of large forest environments. Extensive experiments have revealed that our method is superior to the state-of-the-art methods regarding registration accuracy and robustness, and it significantly outperforms existing techniques in terms of efficiency. Besides, we introduce a new benchmark dataset that complements the very few existing open datasets for the development and evaluation of registration methods for forest point clouds. The source code of our method and the dataset are available at https://github.com/zexinyang/AlignTree.