 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuilding-PCC: Building Point Cloud Completion Benchmarks
Apr 24, 2024With the rapid advancement of 3D sensing technologies, obtaining 3D shape information of objects has become increasingly convenient. Lidar technology, with its capability to accurately capture the 3D information of objects at long distances, has been widely applied in the collection of 3D data in urban scenes. However, the collected point cloud data often exhibit incompleteness due to factors such as occlusion, signal absorption, and specular reflection. This paper explores the application of point cloud completion technologies in processing these incomplete data and establishes a new real-world benchmark Building-PCC dataset, to evaluate the performance of existing deep learning methods in the task of urban building point cloud completion. Through a comprehensive evaluation of different methods, we analyze the key challenges faced in building point cloud completion, aiming to promote innovation in the field of 3D geoinformation applications. Our source code is available at https://github.com/tudelft3d/Building-PCC-Building-Point-Cloud-Completion-Benchmarks.git.
Unsupervised Roofline Extraction from True Orthophotos for LoD2 Building Model Reconstruction
Oct 02, 2023This paper discusses the reconstruction of LoD2 building models from 2D and 3D data for large-scale urban environments. Traditional methods involve the use of LiDAR point clouds, but due to high costs and long intervals associated with acquiring such data for rapidly developing areas, researchers have started exploring the use of point clouds generated from (oblique) aerial images. However, using such point clouds for traditional plane detection-based methods can result in significant errors and introduce noise into the reconstructed building models. To address this, this paper presents a method for extracting rooflines from true orthophotos using line detection for the reconstruction of building models at the LoD2 level. The approach is able to extract relatively complete rooflines without the need for pre-labeled training data or pre-trained models. These lines can directly be used in the LoD2 building model reconstruction process. The method is superior to existing plane detection-based methods and state-of-the-art deep learning methods in terms of the accuracy and completeness of the reconstructed building. Our source code is available at https://github.com/tudelft3d/Roofline-extraction-from-orthophotos.
Push-the-Boundary: Boundary-aware Feature Propagation for Semantic Segmentation of 3D Point Clouds
Dec 23, 2022



Feedforward fully convolutional neural networks currently dominate in semantic segmentation of 3D point clouds. Despite their great success, they suffer from the loss of local information at low-level layers, posing significant challenges to accurate scene segmentation and precise object boundary delineation. Prior works either address this issue by post-processing or jointly learn object boundaries to implicitly improve feature encoding of the networks. These approaches often require additional modules which are difficult to integrate into the original architecture. To improve the segmentation near object boundaries, we propose a boundary-aware feature propagation mechanism. This mechanism is achieved by exploiting a multi-task learning framework that aims to explicitly guide the boundaries to their original locations. With one shared encoder, our network outputs (i) boundary localization, (ii) prediction of directions pointing to the object's interior, and (iii) semantic segmentation, in three parallel streams. The predicted boundaries and directions are fused to propagate the learned features to refine the segmentation. We conduct extensive experiments on the S3DIS and SensatUrban datasets against various baseline methods, demonstrating that our proposed approach yields consistent improvements by reducing boundary errors. Our code is available at https://github.com/shenglandu/PushBoundary.
City3D: Large-scale Urban Reconstruction from Airborne Point Clouds
Jan 25, 2022



We present a fully automatic approach for reconstructing compact 3D building models from large-scale airborne point clouds. A major challenge of urban reconstruction from airborne point clouds lies in that the vertical walls are typically missing. Based on the observation that urban buildings typically consist of planar roofs connected with vertical walls to the ground, we propose an approach to infer the vertical walls directly from the data. With the planar segments of both roofs and walls, we hypothesize the faces of the building surface, and the final model is obtained by using an extended hypothesis-and-selection-based polygonal surface reconstruction framework. Specifically, we introduce a new energy term to encourage roof preferences and two additional hard constraints into the optimization step to ensure correct topology and enhance detail recovery. Experiments on various large-scale airborne point clouds have demonstrated that the method is superior to the state-of-the-art methods in terms of reconstruction accuracy and robustness. In addition, we have generated a new dataset with our method consisting of the point clouds and 3D models of 20k real-world buildings. We believe this dataset can stimulate research in urban reconstruction from airborne point clouds and the use of 3D city models in urban applications.
Automated 3D reconstruction of LoD2 and LoD1 models for all 10 million buildings of the Netherlands
Dec 30, 2021



In this paper we present our workflow to automatically reconstruct 3D building models based on 2D building polygons and a LiDAR point cloud. The workflow generates models at different levels of detail (LoDs) to support data requirements of different applications from one consistent source. Specific attention has been paid to make the workflow robust to quickly run a new iteration in case of improvements in an algorithm or in case new input data become available. The quality of the reconstructed data highly depends on the quality of the input data and is monitored in several steps of the process. A 3D viewer has been developed to view and download the openly available 3D data at different LoDs in different formats. The workflow has been applied to all 10 million buildings of The Netherlands. The 3D service will be updated after new input data becomes available.
Efficient Registration of Forest Point Clouds by Global Matching of Relative Stem Positions
Dec 23, 2021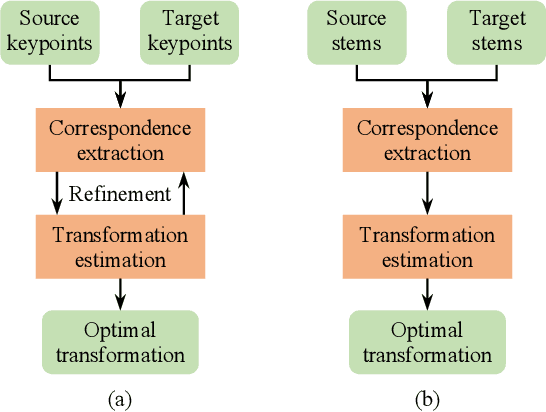

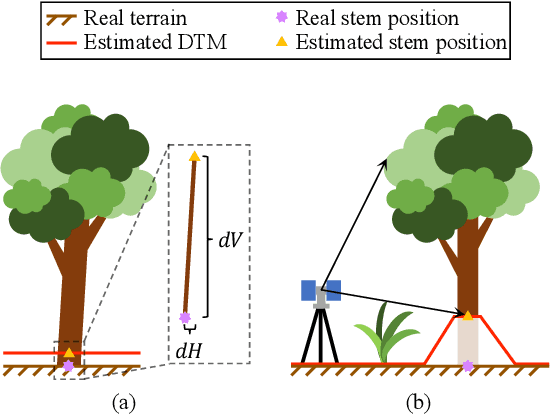
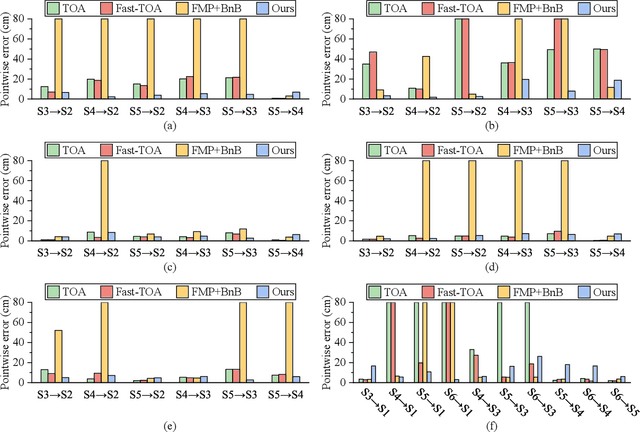
Registering point clouds of forest environments is an essential prerequisite for LiDAR applications in precision forestry. State-of-the-art methods for forest point cloud registration require the extraction of individual tree attributes, and they have an efficiency bottleneck when dealing with point clouds of real-world forests with dense trees. We propose an automatic, robust, and efficient method for the registration of forest point clouds. Our approach first locates tree stems from raw point clouds and then matches the stems based on their relative spatial relationship to determine the registration transformation. In contrast to existing methods, our algorithm requires no extra individual tree attributes and has linear complexity to the number of trees in the environment, allowing it to align point clouds of large forest environments. Extensive experiments have revealed that our method is superior to the state-of-the-art methods regarding registration accuracy and robustness, and it significantly outperforms existing techniques in terms of efficiency. Besides, we introduce a new benchmark dataset that complements the very few existing open datasets for the development and evaluation of registration methods for forest point clouds. The source code of our method and the dataset are available at https://github.com/zexinyang/AlignTree.