 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative State Fusion in Partially Known Multi-agent Environments
Oct 19, 2024

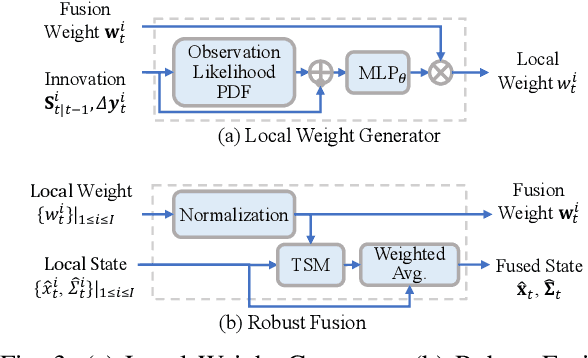

In this paper, we study the collaborative state fusion problem in a multi-agent environment, where mobile agents collaborate to track movable targets. Due to the limited sensing range and potential errors of on-board sensors, it is necessary to aggregate individual observations to provide target state fusion for better target state estimation. Existing schemes do not perform well due to (1) impractical assumption of the fully known prior target state-space model and (2) observation outliers from individual sensors. To address the issues, we propose a two-stage collaborative fusion framework, namely \underline{L}earnable Weighted R\underline{o}bust \underline{F}usion (\textsf{LoF}). \textsf{LoF} combines a local state estimator (e.g., Kalman Filter) with a learnable weight generator to address the mismatch between the prior state-space model and underlying patterns of moving targets. Moreover, given observation outliers, we develop a time-series soft medoid(TSM) scheme to perform robust fusion. We evaluate \textsf{LoF} in a collaborative detection simulation environment with promising results. In an example setting with 4 agents and 2 targets, \textsf{LoF} leads to a 9.1\% higher fusion gain compared to the state-of-the-art.
Up-sampling-only and Adaptive Mesh-based GNN for Simulating Physical Systems
Sep 07, 2024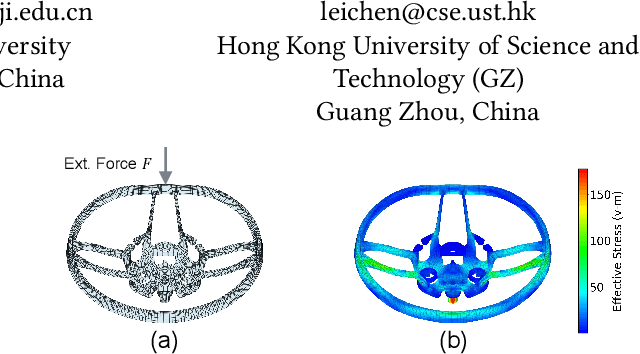
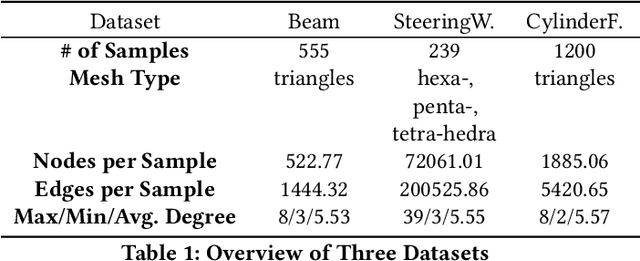
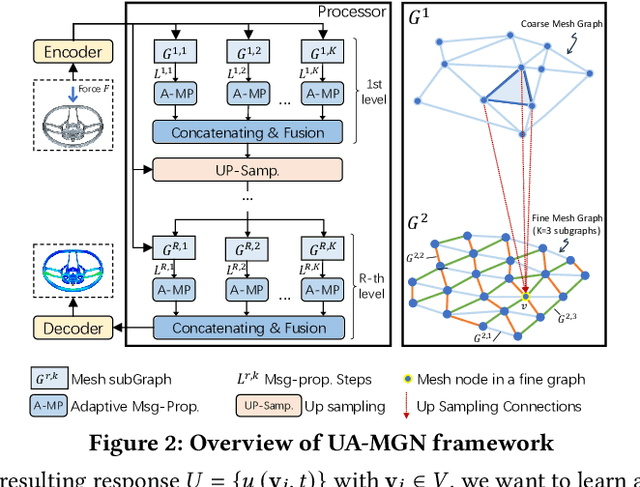
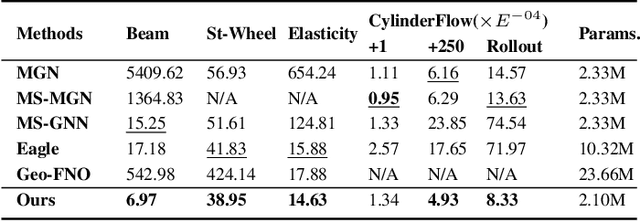
Traditional simulation of complex mechanical systems relies on numerical solvers of Partial Differential Equations (PDEs), e.g., using the Finite Element Method (FEM). The FEM solvers frequently suffer from intensive computation cost and high running time. Recent graph neural network (GNN)-based simulation models can improve running time meanwhile with acceptable accuracy. Unfortunately, they are hard to tailor GNNs for complex mechanical systems, including such disadvantages as ineffective representation and inefficient message propagation (MP). To tackle these issues, in this paper, with the proposed Up-sampling-only and Adaptive MP techniques, we develop a novel hierarchical Mesh Graph Network, namely UA-MGN, for efficient and effective mechanical simulation. Evaluation on two synthetic and one real datasets demonstrates the superiority of the UA-MGN. For example, on the Beam dataset, compared to the state-of-the-art MS-MGN, UA-MGN leads to 40.99% lower errors but using only 43.48% fewer network parameters and 4.49% fewer floating point operations (FLOPs).
Cooperative Path Planning with Asynchronous Multiagent Reinforcement Learning
Sep 01, 2024



In this paper, we study the shortest path problem (SPP) with multiple source-destination pairs (MSD), namely MSD-SPP, to minimize average travel time of all shortest paths. The inherent traffic capacity limits within a road network contributes to the competition among vehicles. Multi-agent reinforcement learning (MARL) model cannot offer effective and efficient path planning cooperation due to the asynchronous decision making setting in MSD-SPP, where vehicles (a.k.a agents) cannot simultaneously complete routing actions in the previous time step. To tackle the efficiency issue, we propose to divide an entire road network into multiple sub-graphs and subsequently execute a two-stage process of inter-region and intra-region route planning. To address the asynchronous issue, in the proposed asyn-MARL framework, we first design a global state, which exploits a low-dimensional vector to implicitly represent the joint observations and actions of multi-agents. Then we develop a novel trajectory collection mechanism to decrease the redundancy in training trajectories. Additionally, we design a novel actor network to facilitate the cooperation among vehicles towards the same or close destinations and a reachability graph aimed at preventing infinite loops in routing paths. On both synthetic and real road networks, our evaluation result demonstrates that our approach outperforms state-of-the-art planning approaches.
Learning-Based Finite Element Methods Modeling for Complex Mechanical Systems
Aug 30, 2024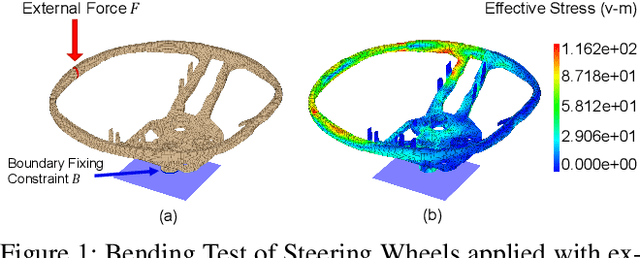
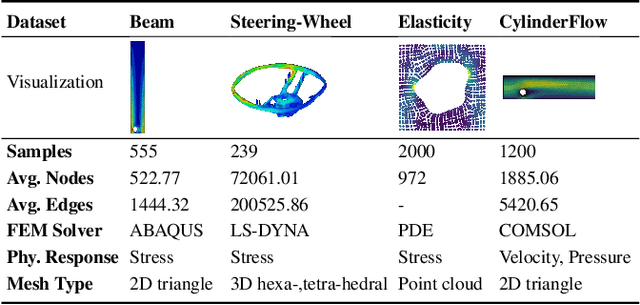
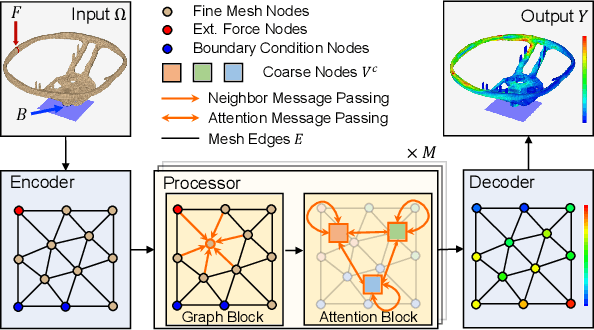
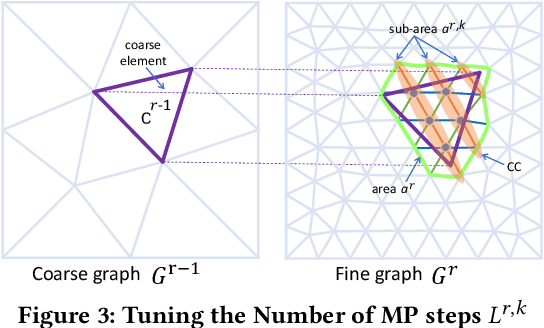
Complex mechanic systems simulation is important in many real-world applications. The de-facto numeric solver using Finite Element Method (FEM) suffers from computationally intensive overhead. Though with many progress on the reduction of computational time and acceptable accuracy, the recent CNN or GNN-based simulation models still struggle to effectively represent complex mechanic simulation caused by the long-range spatial dependency of distance mesh nodes and independently learning local and global representation. In this paper, we propose a novel two-level mesh graph network. The key of the network is to interweave the developed Graph Block and Attention Block to better learn mechanic interactions even for long-rang spatial dependency. Evaluation on three synthetic and one real datasets demonstrates the superiority of our work. For example, on the Beam dataset, our work leads to 54.3\% lower prediction errors and 9.87\% fewer learnable network parameters.
Outdoor Position Recovery from HeterogeneousTelco Cellular Data
Aug 24, 2021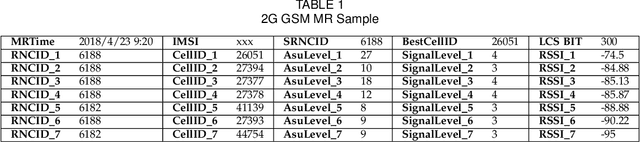
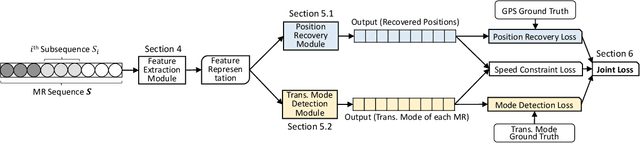
Recent years have witnessed unprecedented amounts of data generated by telecommunication (Telco) cellular networks. For example, measurement records (MRs) are generated to report the connection states between mobile devices and Telco networks, e.g., received signal strength. MR data have been widely used to localize outdoor mobile devices for human mobility analysis, urban planning, and traffic forecasting. Existing works using first-order sequence models such as the Hidden Markov Model (HMM) attempt to capture spatio-temporal locality in underlying mobility patterns for lower localization errors. The HMM approaches typically assume stable mobility patterns of the underlying mobile devices. Yet real MR datasets exhibit heterogeneous mobility patterns due to mixed transportation modes of the underlying mobile devices and uneven distribution of the positions associated with MR samples. Thus, the existing solutions cannot handle these heterogeneous mobility patterns. we propose a multi-task learning-based deep neural network (DNN) framework, namely PRNet+, to incorporate outdoor position recovery and transportation mode detection. To make sure the framework work, PRNet+ develops a feature extraction module to precisely learn local-, short- and long-term spatio-temporal locality from heterogeneous MR samples. Extensive evaluation on eight datasets collected at three representative areas in Shanghai indicates that PRNet+ greatly outperforms state-of-the-arts.
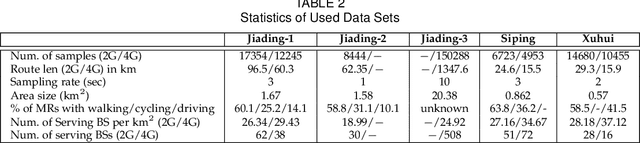
Transfer Learning-Based Outdoor Position Recovery with Telco Data
Dec 10, 2019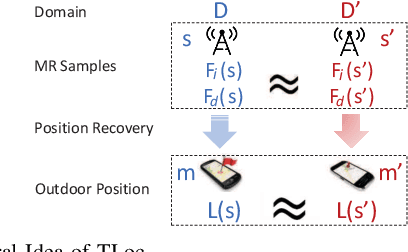
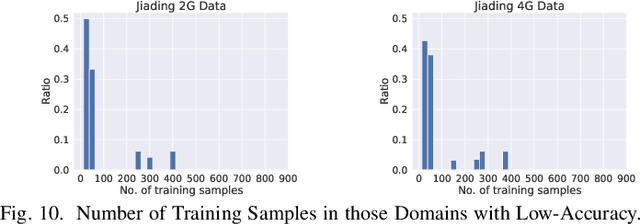
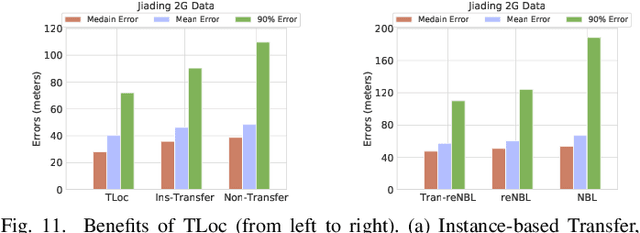
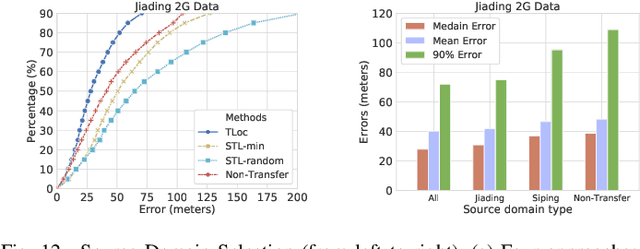
Telecommunication (Telco) outdoor position recovery aims to localize outdoor mobile devices by leveraging measurement report (MR) data. Unfortunately, Telco position recovery requires sufficient amount of MR samples across different areas and suffers from high data collection cost. For an area with scarce MR samples, it is hard to achieve good accuracy. In this paper, by leveraging the recently developed transfer learning techniques, we design a novel Telco position recovery framework, called TLoc, to transfer good models in the carefully selected source domains (those fine-grained small subareas) to a target one which originally suffers from poor localization accuracy. Specifically, TLoc introduces three dedicated components: 1) a new coordinate space to divide an area of interest into smaller domains, 2) a similarity measurement to select best source domains, and 3) an adaptation of an existing transfer learning approach. To the best of our knowledge, TLoc is the first framework that demonstrates the efficacy of applying transfer learning in the Telco outdoor position recovery. To exemplify, on the 2G GSM and 4G LTE MR datasets in Shanghai, TLoc outperforms a nontransfer approach by 27.58% and 26.12% less median errors, and further leads to 47.77% and 49.22% less median errors than a recent fingerprinting approach NBL.