 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Compositional Generalization of Multimodal LLMs for Medical Imaging
Dec 28, 2024



Multimodal large language models (MLLMs) hold significant potential in the medical field, but their capabilities are often limited by insufficient data in certain medical domains, highlighting the need for understanding what kinds of images can be used by MLLMs for generalization. Current research suggests that multi-task training outperforms single-task as different tasks can benefit each other, but they often overlook the internal relationships within these tasks, providing limited guidance on selecting datasets to enhance specific tasks. To analyze this phenomenon, we attempted to employ compositional generalization (CG)-the ability of models to understand novel combinations by recombining learned elements-as a guiding framework. Since medical images can be precisely defined by Modality, Anatomical area, and Task, naturally providing an environment for exploring CG. Therefore, we assembled 106 medical datasets to create Med-MAT for comprehensive experiments. The experiments confirmed that MLLMs can use CG to understand unseen medical images and identified CG as one of the main drivers of the generalization observed in multi-task training. Additionally, further studies demonstrated that CG effectively supports datasets with limited data and delivers consistent performance across different backbones, highlighting its versatility and broad applicability. Med-MAT is publicly available at https://github.com/FreedomIntelligence/Med-MAT.
Energy consumption forecasting using a stacked nonparametric Bayesian approach
Nov 11, 2020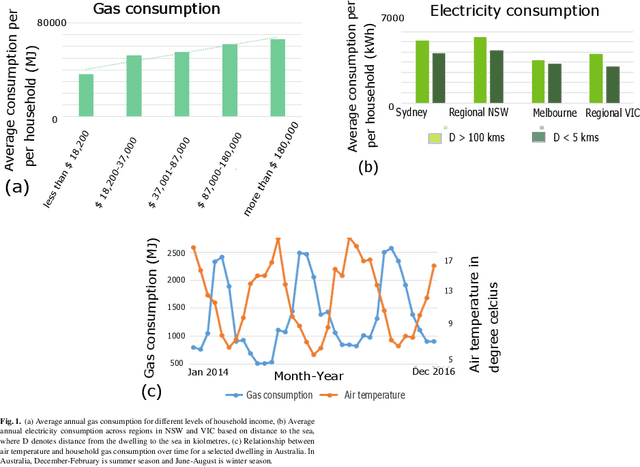
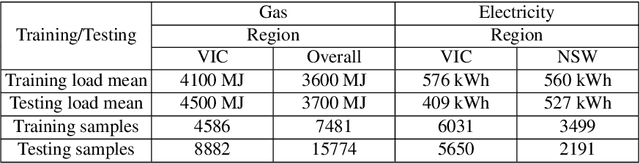
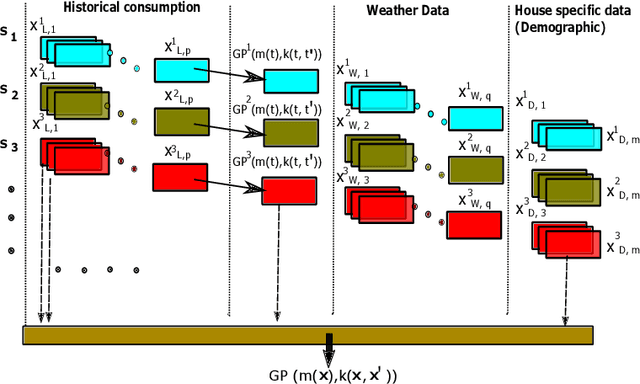
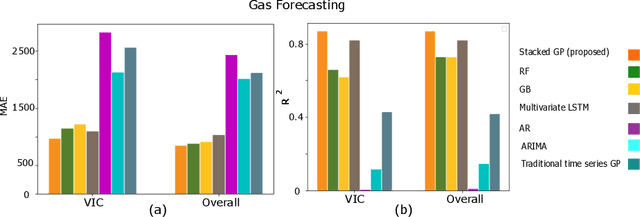
In this paper, the process of forecasting household energy consumption is studied within the framework of the nonparametric Gaussian Process (GP), using multiple short time series data. As we begin to use smart meter data to paint a clearer picture of residential electricity use, it becomes increasingly apparent that we must also construct a detailed picture and understanding of consumer's complex relationship with gas consumption. Both electricity and gas consumption patterns are highly dependent on various factors, and the intricate interplay of these factors is sophisticated. Moreover, since typical gas consumption data is low granularity with very few time points, naive application of conventional time-series forecasting techniques can lead to severe over-fitting. Given these considerations, we construct a stacked GP method where the predictive posteriors of each GP applied to each task are used in the prior and likelihood of the next level GP. We apply our model to a real-world dataset to forecast energy consumption in Australian households across several states. We compare intuitively appealing results against other commonly used machine learning techniques. Overall, the results indicate that the proposed stacked GP model outperforms other forecasting techniques that we tested, especially when we have a multiple short time-series instances.
Learning to Guide: Guidance Law Based on Deep Meta-learning and Model Predictive Path Integral Control
Apr 15, 2019
In this paper, we present a novel guidance scheme based on model-based deep reinforcement learning (RL) technique. With model-based deep RL method, a deep neural network is trained as a predictive model of guidance dynamics which is incorporated into a model predictive path integral (MPPI) control framework. However the traditional MPPI framework assumes the actual environment similar to the training dataset for the deep neural network which is impractical in practice with different maneuvering of target, other perturbations and actuator failures. To address this problem, our method utilize meta-learning technique to make the deep neural dynamics model adapt to such changes online. With this approach we can alleviate the performance deterioration of standard MPPI control caused by the difference between actual environment and training data. Then, a novel guidance law for a varying velocity interceptor intercepting maneuvering target with desired terminal impact angle under actuator failure is constructed based on aforementioned techniques. Simulation and experiment results under different cases show the effectiveness and robustness of the proposed guidance law in achieving successful interceptions of maneuvering target.