 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMUTE-SLAM: Real-Time Neural SLAM with Multiple Tri-Plane Hash Representations
Mar 26, 2024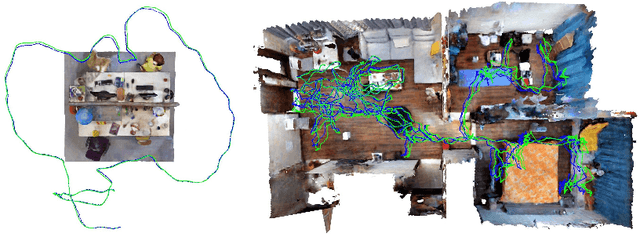
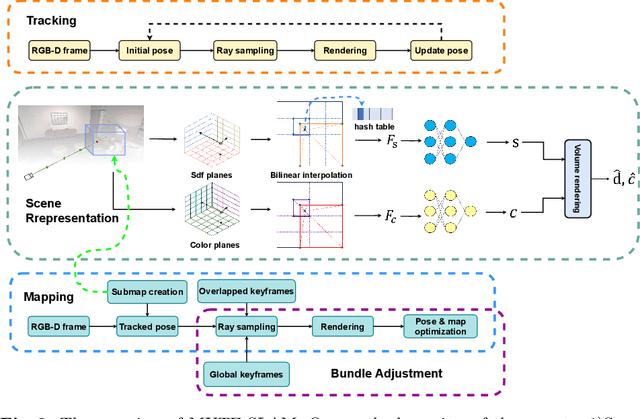
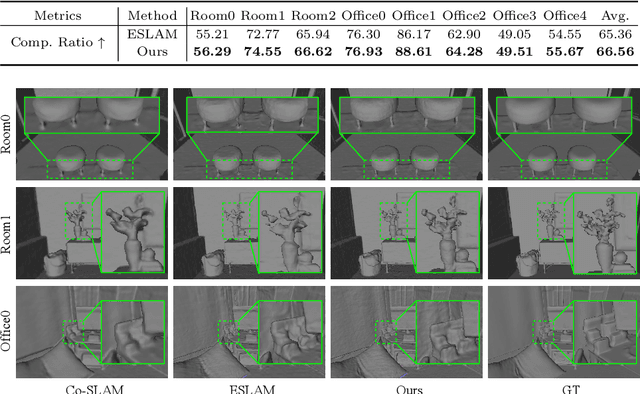
We introduce MUTE-SLAM, a real-time neural RGB-D SLAM system employing multiple tri-plane hash-encodings for efficient scene representation. MUTE-SLAM effectively tracks camera positions and incrementally builds a scalable multi-map representation for both small and large indoor environments. It dynamically allocates sub-maps for newly observed local regions, enabling constraint-free mapping without prior scene information. Unlike traditional grid-based methods, we use three orthogonal axis-aligned planes for hash-encoding scene properties, significantly reducing hash collisions and the number of trainable parameters. This hybrid approach not only speeds up convergence but also enhances the fidelity of surface reconstruction. Furthermore, our optimization strategy concurrently optimizes all sub-maps intersecting with the current camera frustum, ensuring global consistency. Extensive testing on both real-world and synthetic datasets has shown that MUTE-SLAM delivers state-of-the-art surface reconstruction quality and competitive tracking performance across diverse indoor settings. The code will be made public upon acceptance of the paper.
Learning to Guide: Guidance Law Based on Deep Meta-learning and Model Predictive Path Integral Control
Apr 15, 2019
In this paper, we present a novel guidance scheme based on model-based deep reinforcement learning (RL) technique. With model-based deep RL method, a deep neural network is trained as a predictive model of guidance dynamics which is incorporated into a model predictive path integral (MPPI) control framework. However the traditional MPPI framework assumes the actual environment similar to the training dataset for the deep neural network which is impractical in practice with different maneuvering of target, other perturbations and actuator failures. To address this problem, our method utilize meta-learning technique to make the deep neural dynamics model adapt to such changes online. With this approach we can alleviate the performance deterioration of standard MPPI control caused by the difference between actual environment and training data. Then, a novel guidance law for a varying velocity interceptor intercepting maneuvering target with desired terminal impact angle under actuator failure is constructed based on aforementioned techniques. Simulation and experiment results under different cases show the effectiveness and robustness of the proposed guidance law in achieving successful interceptions of maneuvering target.