 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnly My Model On My Data: A Privacy Preserving Approach Protecting one Model and Deceiving Unauthorized Black-Box Models
Feb 14, 2024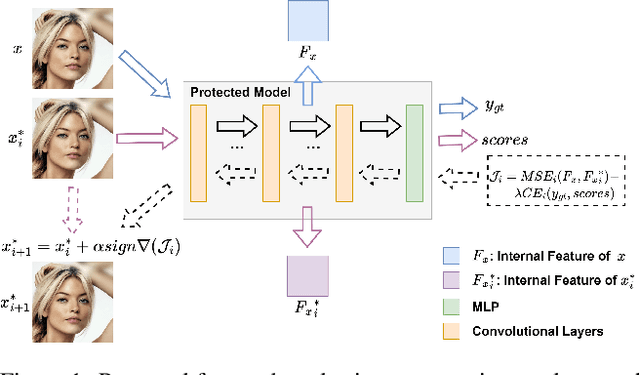
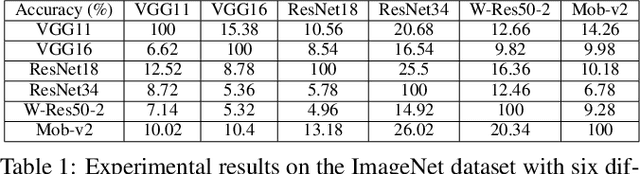
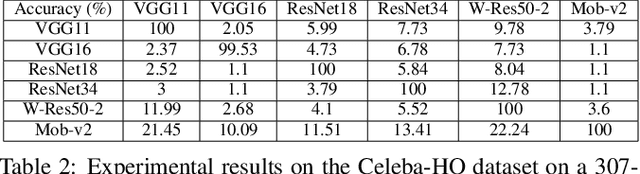
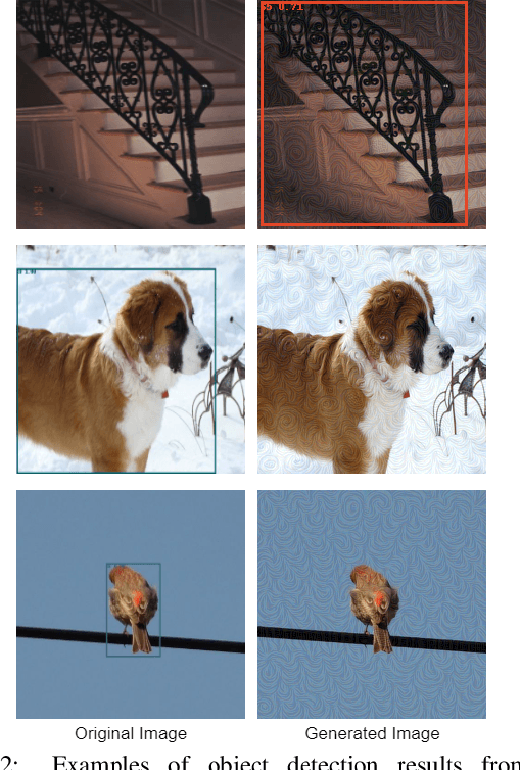
Deep neural networks are extensively applied to real-world tasks, such as face recognition and medical image classification, where privacy and data protection are critical. Image data, if not protected, can be exploited to infer personal or contextual information. Existing privacy preservation methods, like encryption, generate perturbed images that are unrecognizable to even humans. Adversarial attack approaches prohibit automated inference even for authorized stakeholders, limiting practical incentives for commercial and widespread adaptation. This pioneering study tackles an unexplored practical privacy preservation use case by generating human-perceivable images that maintain accurate inference by an authorized model while evading other unauthorized black-box models of similar or dissimilar objectives, and addresses the previous research gaps. The datasets employed are ImageNet, for image classification, Celeba-HQ dataset, for identity classification, and AffectNet, for emotion classification. Our results show that the generated images can successfully maintain the accuracy of a protected model and degrade the average accuracy of the unauthorized black-box models to 11.97%, 6.63%, and 55.51% on ImageNet, Celeba-HQ, and AffectNet datasets, respectively.
RAANet: Range-Aware Attention Network for LiDAR-based 3D Object Detection with Auxiliary Density Level Estimation
Nov 18, 2021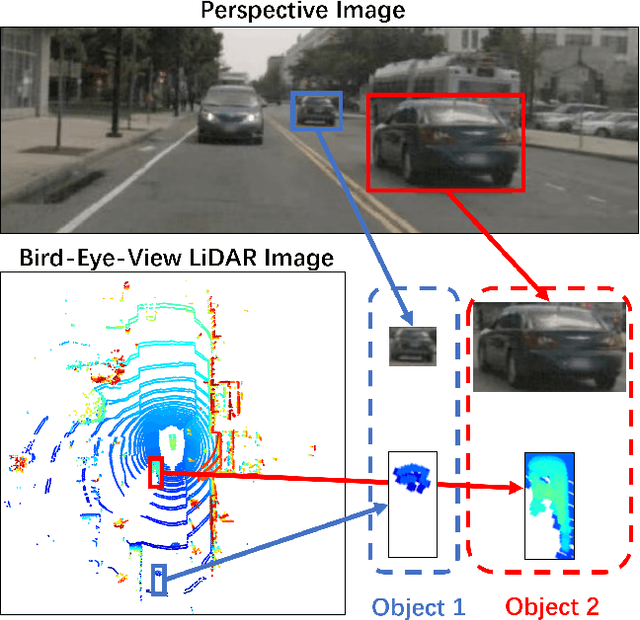
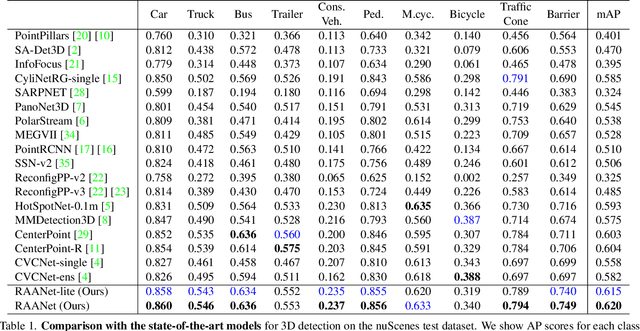

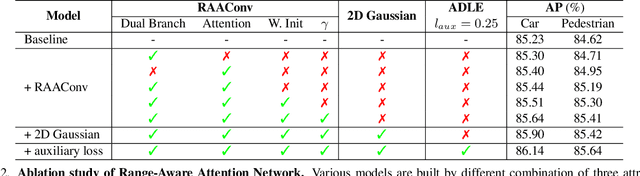
3D object detection from LiDAR data for autonomous driving has been making remarkable strides in recent years. Among the state-of-the-art methodologies, encoding point clouds into a bird's-eye view (BEV) has been demonstrated to be both effective and efficient. Different from perspective views, BEV preserves rich spatial and distance information between objects; and while farther objects of the same type do not appear smaller in the BEV, they contain sparser point cloud features. This fact weakens BEV feature extraction using shared-weight convolutional neural networks. In order to address this challenge, we propose Range-Aware Attention Network (RAANet), which extracts more powerful BEV features and generates superior 3D object detections. The range-aware attention (RAA) convolutions significantly improve feature extraction for near as well as far objects. Moreover, we propose a novel auxiliary loss for density estimation to further enhance the detection accuracy of RAANet for occluded objects. It is worth to note that our proposed RAA convolution is lightweight and compatible to be integrated into any CNN architecture used for the BEV detection. Extensive experiments on the nuScenes dataset demonstrate that our proposed approach outperforms the state-of-the-art methods for LiDAR-based 3D object detection, with real-time inference speed of 16 Hz for the full version and 22 Hz for the lite version. The code is publicly available at an anonymous Github repository https://github.com/anonymous0522/RAAN.
Enhancing Cross-task Black-Box Transferability of Adversarial Examples with Dispersion Reduction
Nov 22, 2019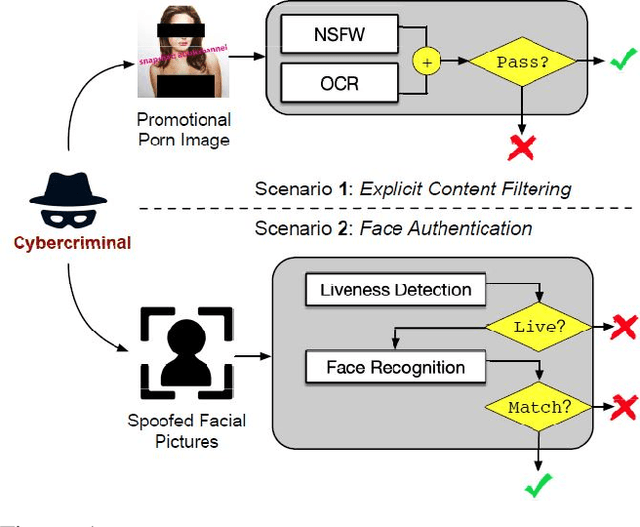
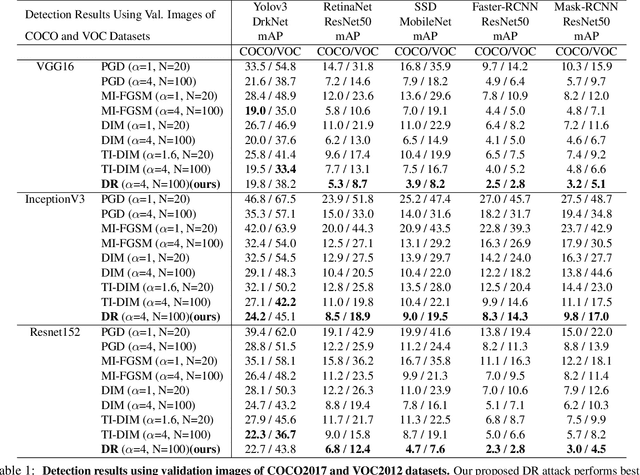
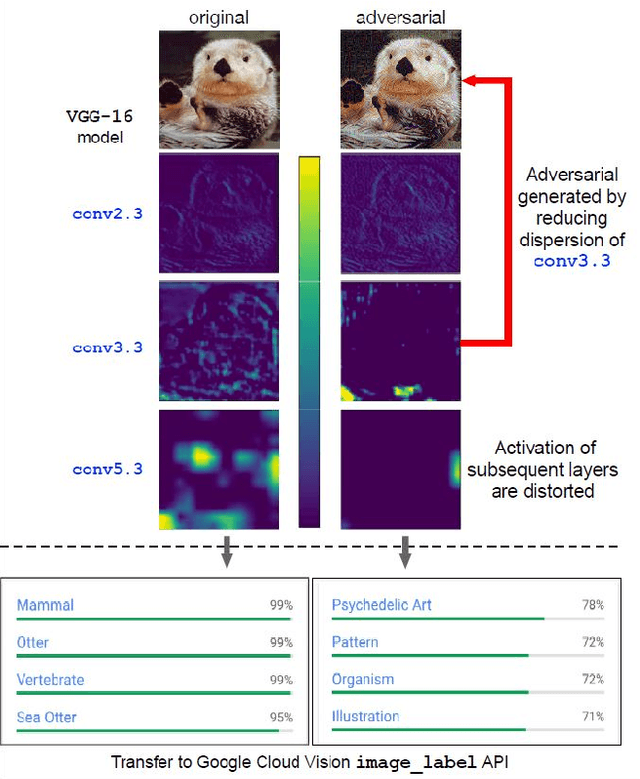

Neural networks are known to be vulnerable to carefully crafted adversarial examples, and these malicious samples often transfer, i.e., they remain adversarial even against other models. Although great efforts have been delved into the transferability across models, surprisingly, less attention has been paid to the cross-task transferability, which represents the real-world cybercriminal's situation, where an ensemble of different defense/detection mechanisms need to be evaded all at once. In this paper, we investigate the transferability of adversarial examples across a wide range of real-world computer vision tasks, including image classification, object detection, semantic segmentation, explicit content detection, and text detection. Our proposed attack minimizes the ``dispersion'' of the internal feature map, which overcomes existing attacks' limitation of requiring task-specific loss functions and/or probing a target model. We conduct evaluation on open source detection and segmentation models as well as four different computer vision tasks provided by Google Cloud Vision (GCV) APIs, to show how our approach outperforms existing attacks by degrading performance of multiple CV tasks by a large margin with only modest perturbations linf=16.