 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDvD: Unleashing a Generative Paradigm for Document Dewarping via Coordinates-based Diffusion Model
May 28, 2025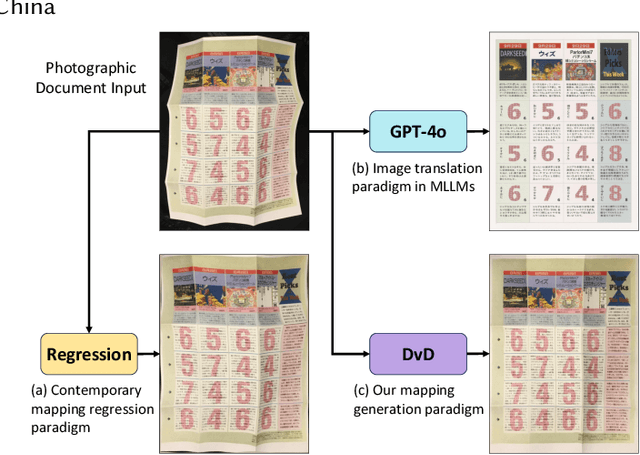
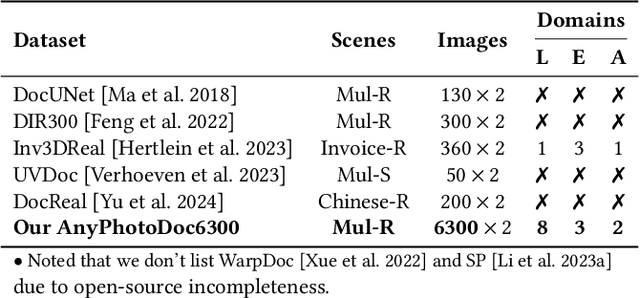
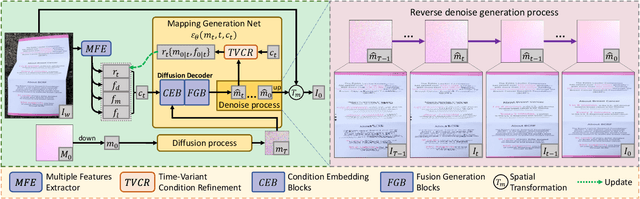
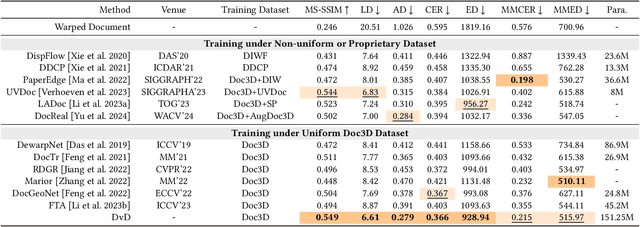
Document dewarping aims to rectify deformations in photographic document images, thus improving text readability, which has attracted much attention and made great progress, but it is still challenging to preserve document structures. Given recent advances in diffusion models, it is natural for us to consider their potential applicability to document dewarping. However, it is far from straightforward to adopt diffusion models in document dewarping due to their unfaithful control on highly complex document images (e.g., 2000$\times$3000 resolution). In this paper, we propose DvD, the first generative model to tackle document \textbf{D}ewarping \textbf{v}ia a \textbf{D}iffusion framework. To be specific, DvD introduces a coordinate-level denoising instead of typical pixel-level denoising, generating a mapping for deformation rectification. In addition, we further propose a time-variant condition refinement mechanism to enhance the preservation of document structures. In experiments, we find that current document dewarping benchmarks can not evaluate dewarping models comprehensively. To this end, we present AnyPhotoDoc6300, a rigorously designed large-scale document dewarping benchmark comprising 6,300 real image pairs across three distinct domains, enabling fine-grained evaluation of dewarping models. Comprehensive experiments demonstrate that our proposed DvD can achieve state-of-the-art performance with acceptable computational efficiency on multiple metrics across various benchmarks including DocUNet, DIR300, and AnyPhotoDoc6300. The new benchmark and code will be publicly available.
Real-Time Asphalt Pavement Layer Thickness Prediction Using Ground-Penetrating Radar Based on a Modified Extended Common Mid-Point (XCMP) Approach
Jan 07, 2024
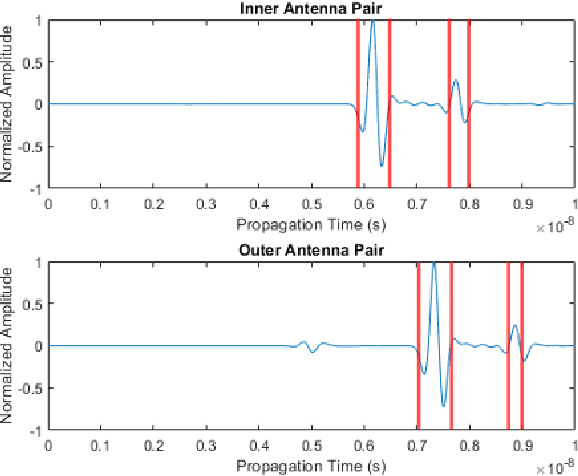


The conventional surface reflection method has been widely used to measure the asphalt pavement layer dielectric constant using ground-penetrating radar (GPR). This method may be inaccurate for in-service pavement thickness estimation with dielectric constant variation through the depth, which could be addressed using the extended common mid-point method (XCMP) with air-coupled GPR antennas. However, the factors affecting the XCMP method on thickness prediction accuracy haven't been studied. Manual acquisition of key factors is required, which hinders its real-time applications. This study investigates the affecting factors and develops a modified XCMP method to allow automatic thickness prediction of in-service asphalt pavement with non-uniform dielectric properties through depth. A sensitivity analysis was performed, necessitating the accurate estimation of time of flights (TOFs) from antenna pairs. A modified XCMP method based on edge detection was proposed to allow real-time TOFs estimation, then dielectric constant and thickness predictions. Field tests using a multi-channel GPR system were performed for validation. Both the surface reflection and XCMP setups were conducted. Results show that the modified XCMP method is recommended with a mean prediction error of 1.86%, which is more accurate than the surface reflection method (5.73%).
Polar-Doc: One-Stage Document Dewarping with Multi-Scope Constraints under Polar Representation
Dec 13, 2023Document dewarping, aiming to eliminate geometric deformation in photographed documents to benefit text recognition, has made great progress in recent years but is still far from being solved. While Cartesian coordinates are typically leveraged by state-of-the-art approaches to learn a group of deformation control points, such representation is not efficient for dewarping model to learn the deformation information. In this work, we explore Polar coordinates representation for each point in document dewarping, namely Polar-Doc. In contrast to most current works adopting a two-stage pipeline typically, Polar representation enables a unified point regression framework for both segmentation and dewarping network in one single stage. Such unification makes the whole model more efficient to learn under an end-to-end optimization pipeline, and also obtains a compact representation. Furthermore, we propose a novel multi-scope Polar-Doc-IOU loss to constrain the relationship among control points as a grid-based regularization under the Polar representation. Visual comparisons and quantitative experiments on two benchmarks show that, with much fewer parameters than the other mainstream counterparts, our one-stage model with multi-scope constraints achieves new state-of-the-art performance on both pixel alignment metrics and OCR metrics. Source codes will be available at \url{*****}.
Pavementscapes: a large-scale hierarchical image dataset for asphalt pavement damage segmentation
Jul 24, 2022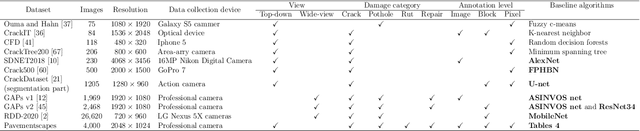
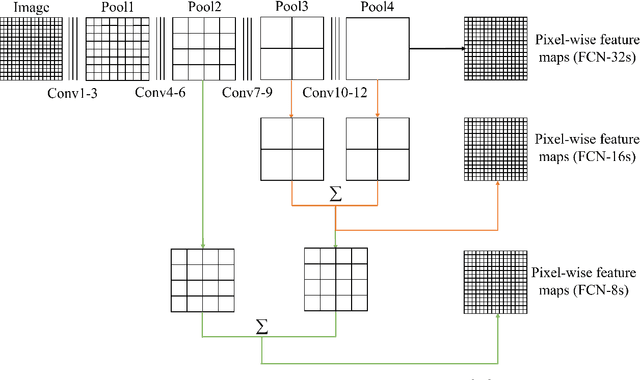
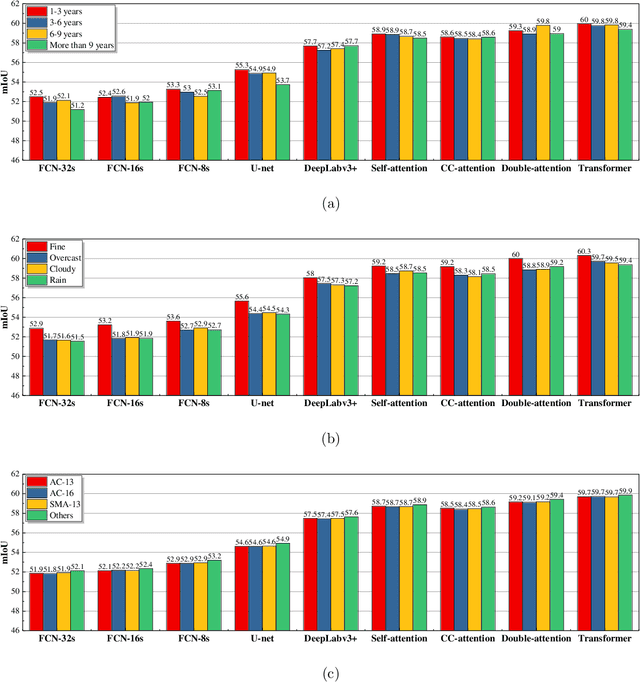
Pavement damage segmentation has benefited enormously from deep learning. % and large-scale datasets. However, few current public datasets limit the potential exploration of deep learning in the application of pavement damage segmentation. To address this problem, this study has proposed Pavementscapes, a large-scale dataset to develop and evaluate methods for pavement damage segmentation. Pavementscapes is comprised of 4,000 images with a resolution of $1024 \times 2048$, which have been recorded in the real-world pavement inspection projects with 15 different pavements. A total of 8,680 damage instances are manually labeled with six damage classes at the pixel level. The statistical study gives a thorough investigation and analysis of the proposed dataset. The numeral experiments propose the top-performing deep neural networks capable of segmenting pavement damages, which provides the baselines of the open challenge for pavement inspection. The experiment results also indicate the existing problems for damage segmentation using deep learning, and this study provides potential solutions.