 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSaliency-Aware Regularized Graph Neural Network
Jan 01, 2024



The crux of graph classification lies in the effective representation learning for the entire graph. Typical graph neural networks focus on modeling the local dependencies when aggregating features of neighboring nodes, and obtain the representation for the entire graph by aggregating node features. Such methods have two potential limitations: 1) the global node saliency w.r.t. graph classification is not explicitly modeled, which is crucial since different nodes may have different semantic relevance to graph classification; 2) the graph representation directly aggregated from node features may have limited effectiveness to reflect graph-level information. In this work, we propose the Saliency-Aware Regularized Graph Neural Network (SAR-GNN) for graph classification, which consists of two core modules: 1) a traditional graph neural network serving as the backbone for learning node features and 2) the Graph Neural Memory designed to distill a compact graph representation from node features of the backbone. We first estimate the global node saliency by measuring the semantic similarity between the compact graph representation and node features. Then the learned saliency distribution is leveraged to regularize the neighborhood aggregation of the backbone, which facilitates the message passing of features for salient nodes and suppresses the less relevant nodes. Thus, our model can learn more effective graph representation. We demonstrate the merits of SAR-GNN by extensive experiments on seven datasets across various types of graph data. Code will be released.
Progressive Multi-Stage Learning for Discriminative Tracking
Apr 01, 2020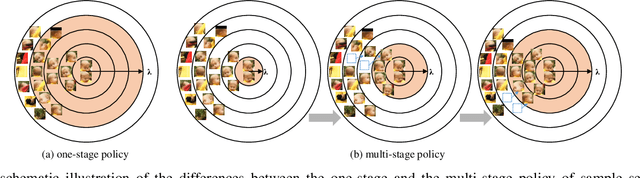

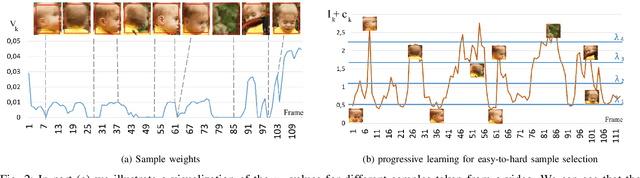
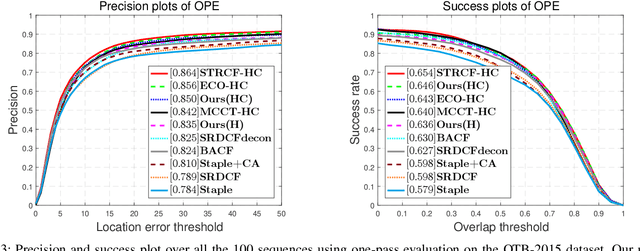
Visual tracking is typically solved as a discriminative learning problem that usually requires high-quality samples for online model adaptation. It is a critical and challenging problem to evaluate the training samples collected from previous predictions and employ sample selection by their quality to train the model. To tackle the above problem, we propose a joint discriminative learning scheme with the progressive multi-stage optimization policy of sample selection for robust visual tracking. The proposed scheme presents a novel time-weighted and detection-guided self-paced learning strategy for easy-to-hard sample selection, which is capable of tolerating relatively large intra-class variations while maintaining inter-class separability. Such a self-paced learning strategy is jointly optimized in conjunction with the discriminative tracking process, resulting in robust tracking results. Experiments on the benchmark datasets demonstrate the effectiveness of the proposed learning framework.
State Distribution-aware Sampling for Deep Q-learning
Apr 23, 2018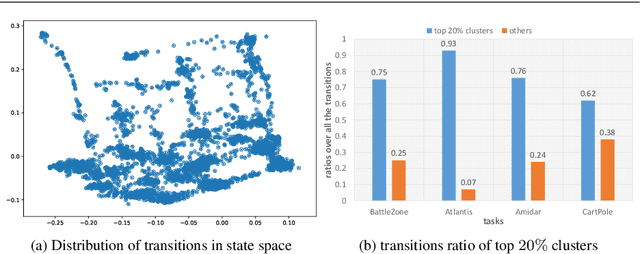
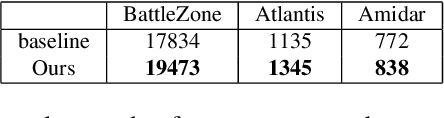
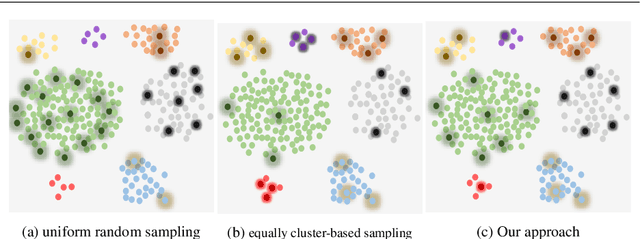
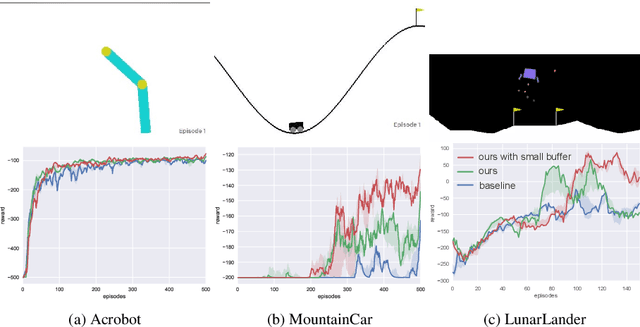
A critical and challenging problem in reinforcement learning is how to learn the state-action value function from the experience replay buffer and simultaneously keep sample efficiency and faster convergence to a high quality solution. In prior works, transitions are uniformly sampled at random from the replay buffer or sampled based on their priority measured by temporal-difference (TD) error. However, these approaches do not fully take into consideration the intrinsic characteristics of transition distribution in the state space and could result in redundant and unnecessary TD updates, slowing down the convergence of the learning procedure. To overcome this problem, we propose a novel state distribution-aware sampling method to balance the replay times for transitions with skew distribution, which takes into account both the occurrence frequencies of transitions and the uncertainty of state-action values. Consequently, our approach could reduce the unnecessary TD updates and increase the TD updates for state-action value with more uncertainty, making the experience replay more effective and efficient. Extensive experiments are conducted on both classic control tasks and Atari 2600 games based on OpenAI gym platform and the experimental results demonstrate the effectiveness of our approach in comparison with the standard DQN approach.