 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSaliency-Aware Regularized Graph Neural Network
Jan 01, 2024



The crux of graph classification lies in the effective representation learning for the entire graph. Typical graph neural networks focus on modeling the local dependencies when aggregating features of neighboring nodes, and obtain the representation for the entire graph by aggregating node features. Such methods have two potential limitations: 1) the global node saliency w.r.t. graph classification is not explicitly modeled, which is crucial since different nodes may have different semantic relevance to graph classification; 2) the graph representation directly aggregated from node features may have limited effectiveness to reflect graph-level information. In this work, we propose the Saliency-Aware Regularized Graph Neural Network (SAR-GNN) for graph classification, which consists of two core modules: 1) a traditional graph neural network serving as the backbone for learning node features and 2) the Graph Neural Memory designed to distill a compact graph representation from node features of the backbone. We first estimate the global node saliency by measuring the semantic similarity between the compact graph representation and node features. Then the learned saliency distribution is leveraged to regularize the neighborhood aggregation of the backbone, which facilitates the message passing of features for salient nodes and suppresses the less relevant nodes. Thus, our model can learn more effective graph representation. We demonstrate the merits of SAR-GNN by extensive experiments on seven datasets across various types of graph data. Code will be released.
EasyNet: An Easy Network for 3D Industrial Anomaly Detection
Aug 07, 2023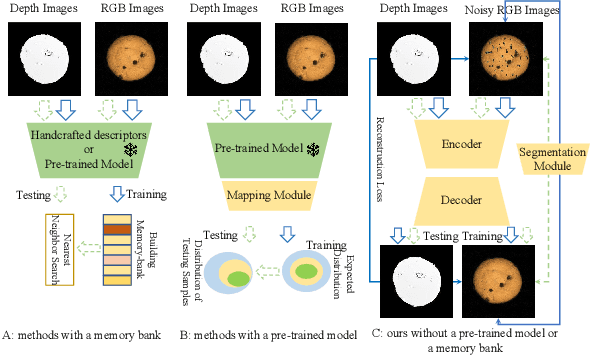
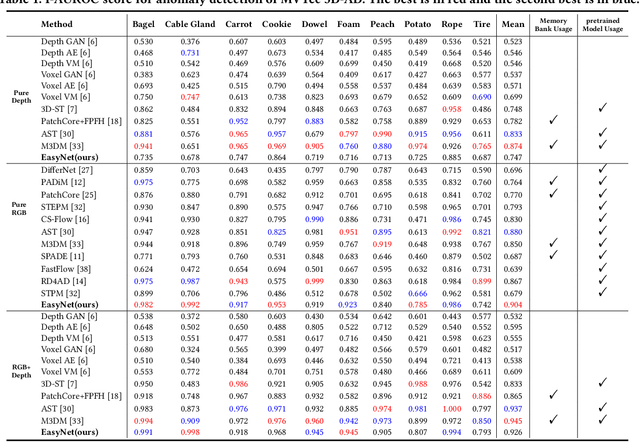
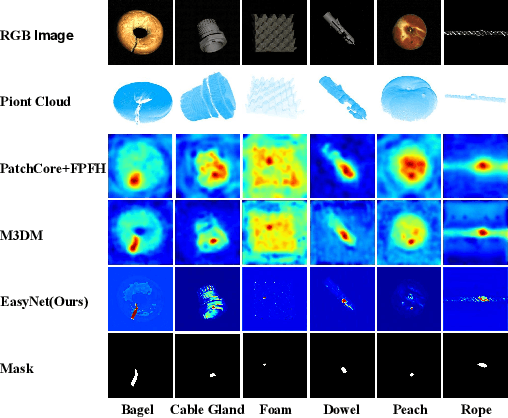
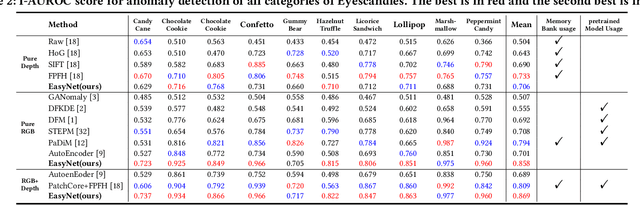
3D anomaly detection is an emerging and vital computer vision task in industrial manufacturing (IM). Recently many advanced algorithms have been published, but most of them cannot meet the needs of IM. There are several disadvantages: i) difficult to deploy on production lines since their algorithms heavily rely on large pre-trained models; ii) hugely increase storage overhead due to overuse of memory banks; iii) the inference speed cannot be achieved in real-time. To overcome these issues, we propose an easy and deployment-friendly network (called EasyNet) without using pre-trained models and memory banks: firstly, we design a multi-scale multi-modality feature encoder-decoder to accurately reconstruct the segmentation maps of anomalous regions and encourage the interaction between RGB images and depth images; secondly, we adopt a multi-modality anomaly segmentation network to achieve a precise anomaly map; thirdly, we propose an attention-based information entropy fusion module for feature fusion during inference, making it suitable for real-time deployment. Extensive experiments show that EasyNet achieves an anomaly detection AUROC of 92.6% without using pre-trained models and memory banks. In addition, EasyNet is faster than existing methods, with a high frame rate of 94.55 FPS on a Tesla V100 GPU.