 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmniVideo-R1: Reinforcing Audio-visual Reasoning with Query Intention and Modality Attention
Feb 05, 2026While humans perceive the world through diverse modalities that operate synergistically to support a holistic understanding of their surroundings, existing omnivideo models still face substantial challenges on audio-visual understanding tasks. In this paper, we propose OmniVideo-R1, a novel reinforced framework that improves mixed-modality reasoning. OmniVideo-R1 empowers models to "think with omnimodal cues" by two key strategies: (1) query-intensive grounding based on self-supervised learning paradigms; and (2) modality-attentive fusion built upon contrastive learning paradigms. Extensive experiments on multiple benchmarks demonstrate that OmniVideo-R1 consistently outperforms strong baselines, highlighting its effectiveness and robust generalization capabilities.
Luminark: Training-free, Probabilistically-Certified Watermarking for General Vision Generative Models
Jan 03, 2026In this paper, we introduce \emph{Luminark}, a training-free and probabilistically-certified watermarking method for general vision generative models. Our approach is built upon a novel watermark definition that leverages patch-level luminance statistics. Specifically, the service provider predefines a binary pattern together with corresponding patch-level thresholds. To detect a watermark in a given image, we evaluate whether the luminance of each patch surpasses its threshold and then verify whether the resulting binary pattern aligns with the target one. A simple statistical analysis demonstrates that the false positive rate of the proposed method can be effectively controlled, thereby ensuring certified detection. To enable seamless watermark injection across different paradigms, we leverage the widely adopted guidance technique as a plug-and-play mechanism and develop the \emph{watermark guidance}. This design enables Luminark to achieve generality across state-of-the-art generative models without compromising image quality. Empirically, we evaluate our approach on nine models spanning diffusion, autoregressive, and hybrid frameworks. Across all evaluations, Luminark consistently demonstrates high detection accuracy, strong robustness against common image transformations, and good performance on visual quality.
Towards Infant Sleep-Optimized Driving: Synergizing Wearable and Vehicle Sensing in Intelligent Cruise Control
Jun 06, 2025Automated driving (AD) has substantially improved vehicle safety and driving comfort, but their impact on passenger well-being, particularly infant sleep, is not sufficiently studied. Sudden acceleration, abrupt braking, and sharp maneuvers can disrupt infant sleep, compromising both passenger comfort and parental convenience. To solve this problem, this paper explores the integration of reinforcement learning (RL) within AD to personalize driving behavior and optimally balance occupant comfort and travel efficiency. In particular, we propose an intelligent cruise control framework that adapts to varying driving conditions to enhance infant sleep quality by effectively synergizing wearable sensing and vehicle data. Long short-term memory (LSTM) and transformer-based neural networks are integrated with RL to model the relationship between driving behavior and infant sleep quality under diverse traffic and road conditions. Based on the sleep quality indicators from the wearable sensors, driving action data from vehicle controllers, and map data from map applications, the model dynamically computes the optimal driving aggressiveness level, which is subsequently translated into specific AD control strategies, e.g., the magnitude and frequency of acceleration, lane change, and overtaking. Simulation results demonstrate that the proposed solution significantly improves infant sleep quality compared to baseline methods, while preserving desirable travel efficiency.
The Power of Active Multi-Task Learning in Reinforcement Learning from Human Feedback
May 18, 2024Reinforcement learning from human feedback (RLHF) has contributed to performance improvements in large language models. To tackle its reliance on substantial amounts of human-labeled data, a successful approach is multi-task representation learning, which involves learning a high-quality, low-dimensional representation from a wide range of source tasks. In this paper, we formulate RLHF as the contextual dueling bandit problem and assume a common linear representation. We demonstrate that the sample complexity of source tasks in multi-task RLHF can be reduced by considering task relevance and allocating different sample sizes to source tasks with varying task relevance. We further propose an algorithm to estimate task relevance by a small number of additional data and then learn a policy. We prove that to achieve $\varepsilon-$optimal, the sample complexity of the source tasks can be significantly reduced compared to uniform sampling. Additionally, the sample complexity of the target task is only linear in the dimension of the latent space, thanks to representation learning.
Real3D-AD: A Dataset of Point Cloud Anomaly Detection
Sep 26, 2023High-precision point cloud anomaly detection is the gold standard for identifying the defects of advancing machining and precision manufacturing. Despite some methodological advances in this area, the scarcity of datasets and the lack of a systematic benchmark hinder its development. We introduce Real3D-AD, a challenging high-precision point cloud anomaly detection dataset, addressing the limitations in the field. With 1,254 high-resolution 3D items from forty thousand to millions of points for each item, Real3D-AD is the largest dataset for high-precision 3D industrial anomaly detection to date. Real3D-AD surpasses existing 3D anomaly detection datasets available regarding point cloud resolution (0.0010mm-0.0015mm), 360 degree coverage and perfect prototype. Additionally, we present a comprehensive benchmark for Real3D-AD, revealing the absence of baseline methods for high-precision point cloud anomaly detection. To address this, we propose Reg3D-AD, a registration-based 3D anomaly detection method incorporating a novel feature memory bank that preserves local and global representations. Extensive experiments on the Real3D-AD dataset highlight the effectiveness of Reg3D-AD. For reproducibility and accessibility, we provide the Real3D-AD dataset, benchmark source code, and Reg3D-AD on our website:https://github.com/M-3LAB/Real3D-AD.
EasyNet: An Easy Network for 3D Industrial Anomaly Detection
Aug 07, 2023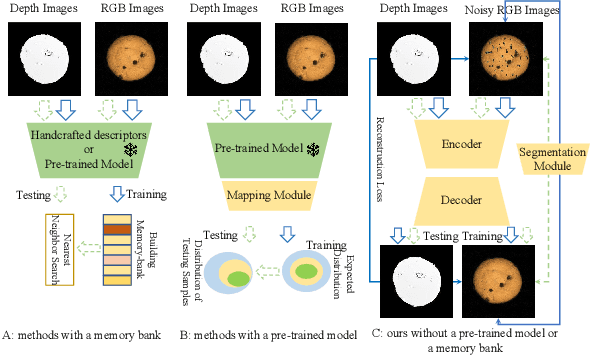
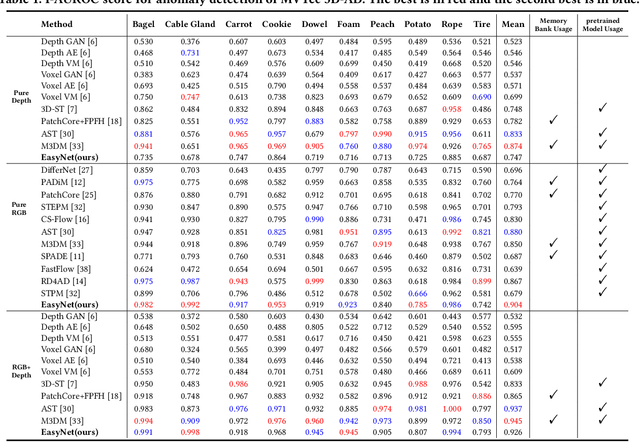
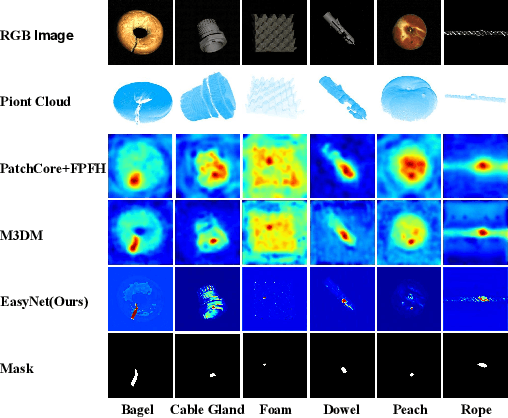
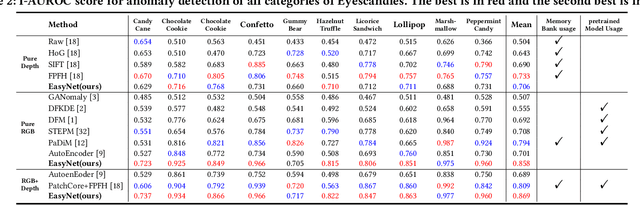
3D anomaly detection is an emerging and vital computer vision task in industrial manufacturing (IM). Recently many advanced algorithms have been published, but most of them cannot meet the needs of IM. There are several disadvantages: i) difficult to deploy on production lines since their algorithms heavily rely on large pre-trained models; ii) hugely increase storage overhead due to overuse of memory banks; iii) the inference speed cannot be achieved in real-time. To overcome these issues, we propose an easy and deployment-friendly network (called EasyNet) without using pre-trained models and memory banks: firstly, we design a multi-scale multi-modality feature encoder-decoder to accurately reconstruct the segmentation maps of anomalous regions and encourage the interaction between RGB images and depth images; secondly, we adopt a multi-modality anomaly segmentation network to achieve a precise anomaly map; thirdly, we propose an attention-based information entropy fusion module for feature fusion during inference, making it suitable for real-time deployment. Extensive experiments show that EasyNet achieves an anomaly detection AUROC of 92.6% without using pre-trained models and memory banks. In addition, EasyNet is faster than existing methods, with a high frame rate of 94.55 FPS on a Tesla V100 GPU.
Monte Carlo Policy Gradient Method for Binary Optimization
Jul 03, 2023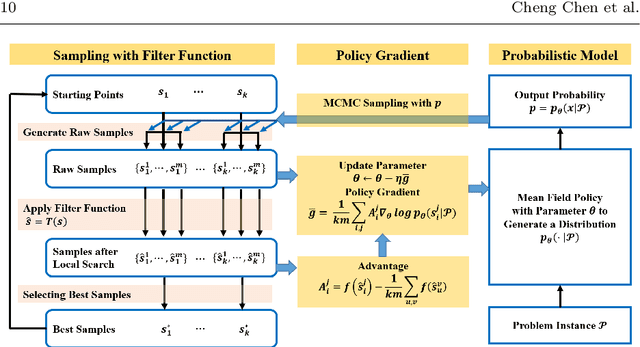
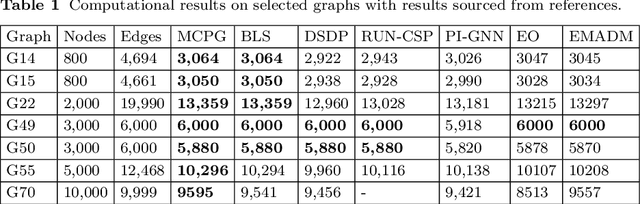
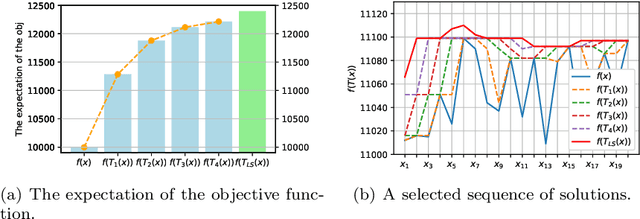
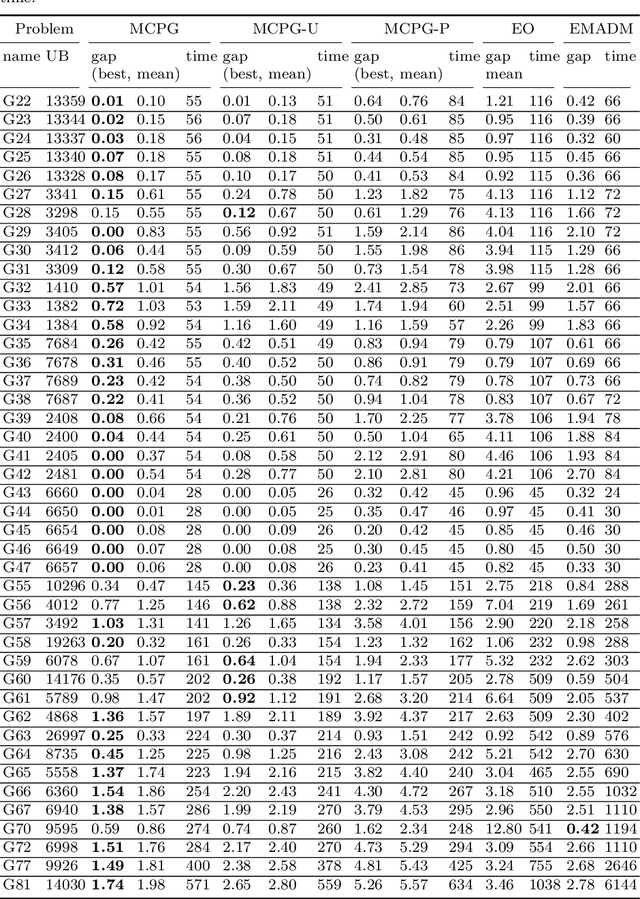
Binary optimization has a wide range of applications in combinatorial optimization problems such as MaxCut, MIMO detection, and MaxSAT. However, these problems are typically NP-hard due to the binary constraints. We develop a novel probabilistic model to sample the binary solution according to a parameterized policy distribution. Specifically, minimizing the KL divergence between the parameterized policy distribution and the Gibbs distributions of the function value leads to a stochastic optimization problem whose policy gradient can be derived explicitly similar to reinforcement learning. For coherent exploration in discrete spaces, parallel Markov Chain Monte Carlo (MCMC) methods are employed to sample from the policy distribution with diversity and approximate the gradient efficiently. We further develop a filter scheme to replace the original objective function by the one with the local search technique to broaden the horizon of the function landscape. Convergence to stationary points in expectation of the policy gradient method is established based on the concentration inequality for MCMC. Numerical results show that this framework is very promising to provide near-optimal solutions for quite a few binary optimization problems.