 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDCDepth: Progressive Monocular Depth Estimation in Discrete Cosine Domain
Oct 19, 2024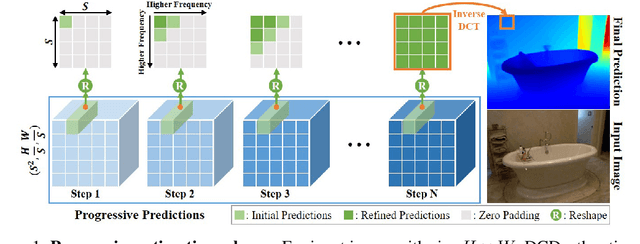
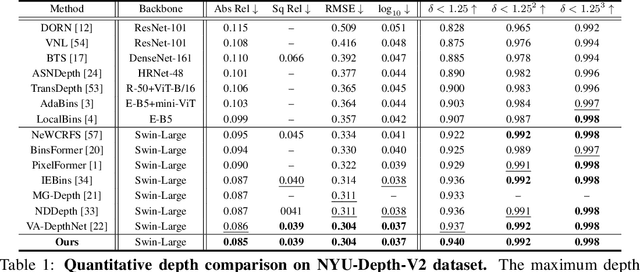

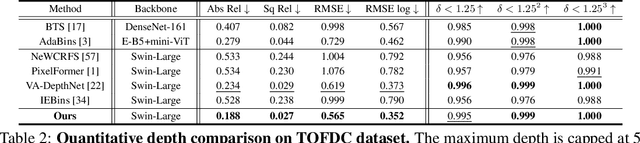
In this paper, we introduce DCDepth, a novel framework for the long-standing monocular depth estimation task. Moving beyond conventional pixel-wise depth estimation in the spatial domain, our approach estimates the frequency coefficients of depth patches after transforming them into the discrete cosine domain. This unique formulation allows for the modeling of local depth correlations within each patch. Crucially, the frequency transformation segregates the depth information into various frequency components, with low-frequency components encapsulating the core scene structure and high-frequency components detailing the finer aspects. This decomposition forms the basis of our progressive strategy, which begins with the prediction of low-frequency components to establish a global scene context, followed by successive refinement of local details through the prediction of higher-frequency components. We conduct comprehensive experiments on NYU-Depth-V2, TOFDC, and KITTI datasets, and demonstrate the state-of-the-art performance of DCDepth. Code is available at https://github.com/w2kun/DCDepth.
Harmonious Group Choreography with Trajectory-Controllable Diffusion
Mar 10, 2024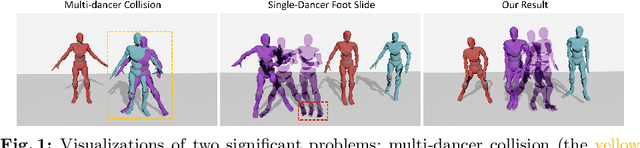
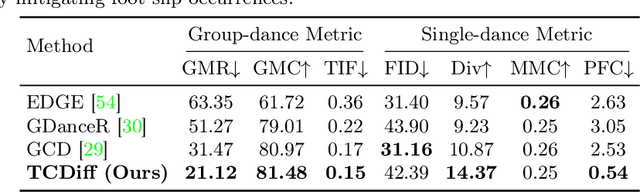
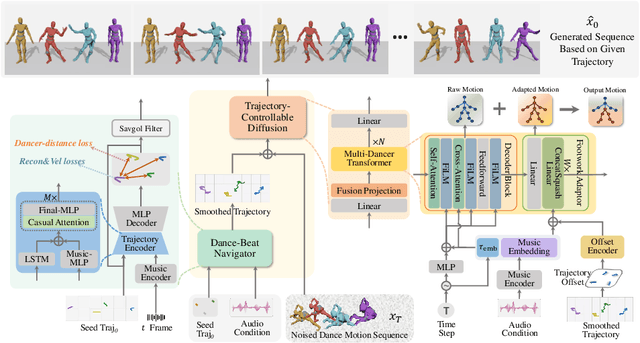
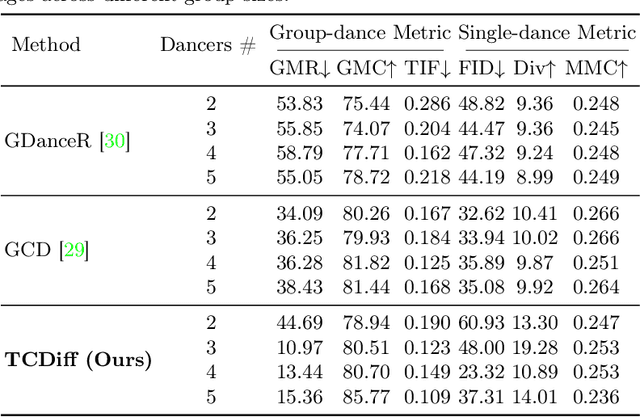
Creating group choreography from music has gained attention in cultural entertainment and virtual reality, aiming to coordinate visually cohesive and diverse group movements. Despite increasing interest, recent works face challenges in achieving aesthetically appealing choreography, primarily for two key issues: multi-dancer collision and single-dancer foot slide. To address these issues, we propose a Trajectory-Controllable Diffusion (TCDiff), a novel approach that harnesses non-overlapping trajectories to facilitate coherent dance movements. Specifically, to tackle dancer collisions, we introduce a Dance-Beat Navigator capable of generating trajectories for multiple dancers based on the music, complemented by a Distance-Consistency loss to maintain appropriate spacing among trajectories within a reasonable threshold. To mitigate foot sliding, we present a Footwork Adaptor that utilizes trajectory displacement from adjacent frames to enable flexible footwork, coupled with a Relative Forward-Kinematic loss to adjust the positioning of individual dancers' root nodes and joints. Extensive experiments demonstrate that our method achieves state-of-the-art results.