 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge1st Workshop on Maritime Computer Vision 2023: Challenge Results
Nov 28, 2022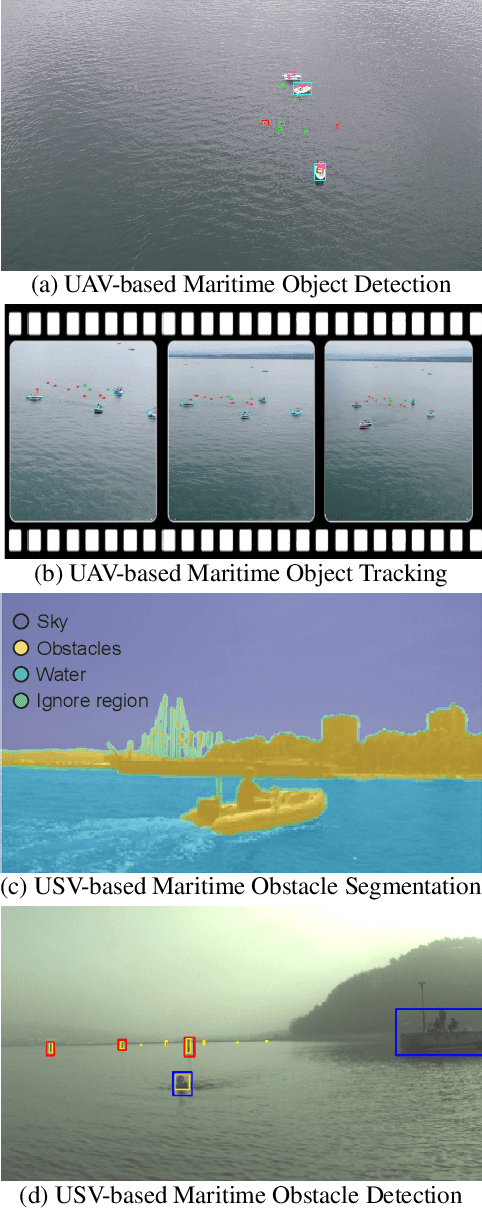
The 1$^{\text{st}}$ Workshop on Maritime Computer Vision (MaCVi) 2023 focused on maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicle (USV), and organized several subchallenges in this domain: (i) UAV-based Maritime Object Detection, (ii) UAV-based Maritime Object Tracking, (iii) USV-based Maritime Obstacle Segmentation and (iv) USV-based Maritime Obstacle Detection. The subchallenges were based on the SeaDronesSee and MODS benchmarks. This report summarizes the main findings of the individual subchallenges and introduces a new benchmark, called SeaDronesSee Object Detection v2, which extends the previous benchmark by including more classes and footage. We provide statistical and qualitative analyses, and assess trends in the best-performing methodologies of over 130 submissions. The methods are summarized in the appendix. The datasets, evaluation code and the leaderboard are publicly available at https://seadronessee.cs.uni-tuebingen.de/macvi.
Learning Feature Aggregation in Temporal Domain for Re-Identification
Mar 12, 2019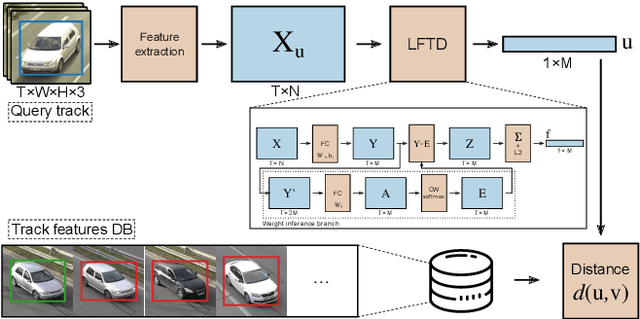

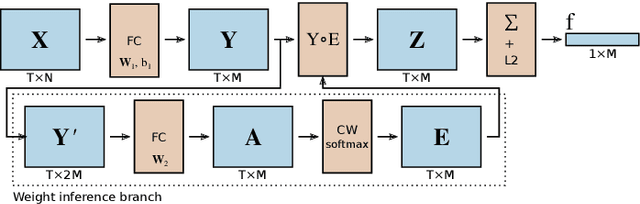

Person re-identification is a standard and established problem in the computer vision community. In recent years, vehicle re-identification is also getting more attention. In this paper, we focus on both these tasks and propose a method for aggregation of features in temporal domain as it is common to have multiple observations of the same object. The aggregation is based on weighting different elements of the feature vectors by different weights and it is trained in an end-to-end manner by a Siamese network. The experimental results show that our method outperforms other existing methods for feature aggregation in temporal domain on both vehicle and person re-identification tasks. Furthermore, to push research in vehicle re-identification further, we introduce a novel dataset CarsReId74k. The dataset is not limited to frontal/rear viewpoints. It contains 17,681 unique vehicles, 73,976 observed tracks, and 277,236 positive pairs. The dataset was captured by 66 cameras from various angles.