 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Model Predictive Control of a 3D Hopping Robot: Leveraging Lie Group Integrators for Dynamically Stable Behaviors
Sep 27, 2022

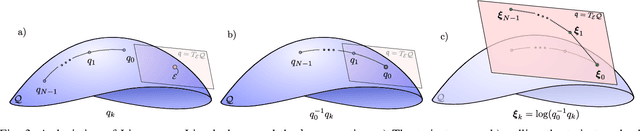
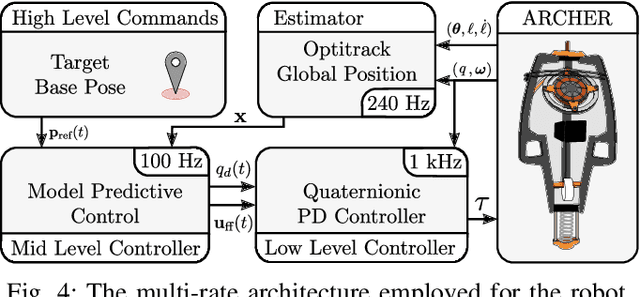
Achieving stable hopping has been a hallmark challenge in the field of dynamic legged locomotion. Controlled hopping is notably difficult due to extended periods of underactuation, combined with very short ground phases wherein ground interactions must be modulated to regulate global state. In this work, we explore the use of hybrid nonlinear model predictive control, paired with a low-level feedback controller in a multi-rate hierarchy, to achieve dynamically stable motions on a novel 3D hopping robot. In order to demonstrate richer behaviors on the manifold of rotations, both the planning and feedback layers must be done in a geometrically consistent fashion; therefore, we develop the necessary tools to employ Lie group integrators and an appropriate feedback controller. We experimentally demonstrate stable 3D hopping on a novel robot, as well as trajectory tracking and flipping in simulation.
Compactly Restrictable Metric Policy Optimization Problems
Jul 12, 2022
We study policy optimization problems for deterministic Markov decision processes (MDPs) with metric state and action spaces, which we refer to as Metric Policy Optimization Problems (MPOPs). Our goal is to establish theoretical results on the well-posedness of MPOPs that can characterize practically relevant continuous control systems. To do so, we define a special class of MPOPs called Compactly Restrictable MPOPs (CR-MPOPs), which are flexible enough to capture the complex behavior of robotic systems but specific enough to admit solutions using dynamic programming methods such as value iteration. We show how to arrive at CR-MPOPs using forward-invariance. We further show that our theoretical results on CR-MPOPs can be used to characterize feedback linearizable control affine systems.
Safety of Sampled-Data Systems with Control Barrier Functions via Approximate Discrete Time Models
Mar 22, 2022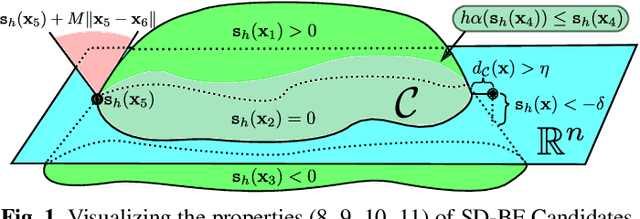


Control Barrier Functions (CBFs) have been demonstrated to be a powerful tool for safety-critical controller design for nonlinear systems. Existing design paradigms do not address the gap between theory (controller design with continuous time models) and practice (the discrete time sampled implementation of the resulting controllers); this can lead to poor performance and violations of safety for hardware instantiations. We propose an approach to close this gap by synthesizing sampled-data counterparts to these CBF-based controllers using approximate discrete time models and Sampled-Data Control Barrier Functions (SD-CBFs). Using properties of a system's continuous time model, we establish a relationship between SD-CBFs and a notion of practical safety for sampled-data systems. Furthermore, we construct convex optimization-based controllers that formally endow nonlinear systems with safety guarantees in practice. We demonstrate the efficacy of these controllers in simulation.
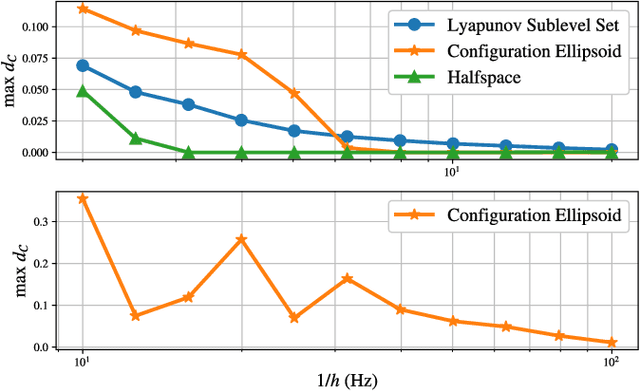
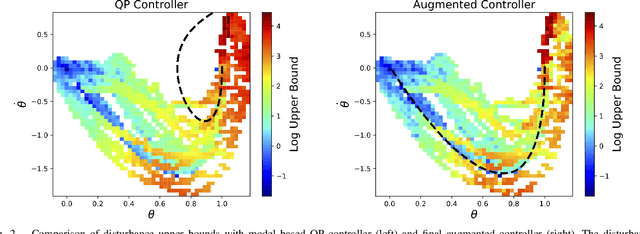
Towards Robust Data-Driven Control Synthesis for Nonlinear Systems with Actuation Uncertainty
Nov 21, 2020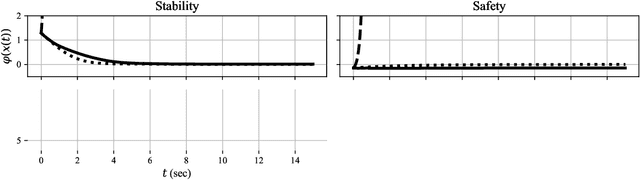
Modern nonlinear control theory seeks to endow systems with properties such as stability and safety, and has been deployed successfully across various domains. Despite this success, model uncertainty remains a significant challenge in ensuring that model-based controllers transfer to real world systems. This paper develops a data-driven approach to robust control synthesis in the presence of model uncertainty using Control Certificate Functions (CCFs), resulting in a convex optimization based controller for achieving properties like stability and safety. An important benefit of our framework is nuanced data-dependent guarantees, which in principle can yield sample-efficient data collection approaches that need not fully determine the input-to-state relationship. This work serves as a starting point for addressing important questions at the intersection of nonlinear control theory and non-parametric learning, both theoretical and in application. We validate the proposed method in simulation with an inverted pendulum in multiple experimental configurations.
A Control Lyapunov Perspective on Episodic Learning via Projection to State Stability
Mar 18, 2019
The goal of this paper is to understand the impact of learning on control synthesis from a Lyapunov function perspective. In particular, rather than consider uncertainties in the full system dynamics, we employ Control Lyapunov Functions (CLFs) as low-dimensional projections. To understand and characterize the uncertainty that these projected dynamics introduce in the system, we introduce a new notion: Projection to State Stability (PSS). PSS can be viewed as a variant of Input to State Stability defined on projected dynamics, and enables characterizing robustness of a CLF with respect to the data used to learn system uncertainties. We use PSS to bound uncertainty in affine control, and demonstrate that a practical episodic learning approach can use PSS to characterize uncertainty in the CLF for robust control synthesis.
Episodic Learning with Control Lyapunov Functions for Uncertain Robotic Systems
Mar 04, 2019
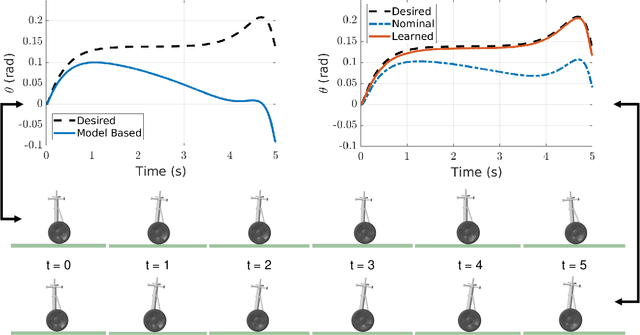
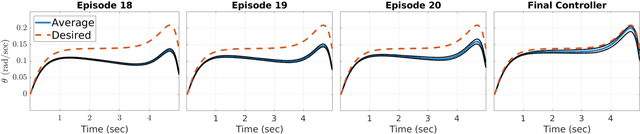
Many modern nonlinear control methods aim to endow systems with guaranteed properties, such as stability or safety, and have been successfully applied to the domain of robotics. However, model uncertainty remains a persistent challenge, weakening theoretical guarantees and causing implementation failures on physical systems. This paper develops a machine learning framework centered around Control Lyapunov Functions (CLFs) to adapt to parametric uncertainty and unmodeled dynamics in general robotic systems. Our proposed method proceeds by iteratively updating estimates of Lyapunov function derivatives and improving controllers, ultimately yielding a stabilizing quadratic program model-based controller. We validate our approach on a planar Segway simulation, demonstrating substantial performance improvements by iteratively refining on a base model-free controller.