 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Model Predictive Control of a 3D Hopping Robot: Leveraging Lie Group Integrators for Dynamically Stable Behaviors
Paper and Code
Sep 27, 2022

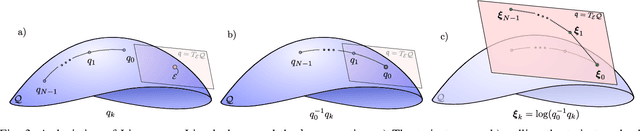
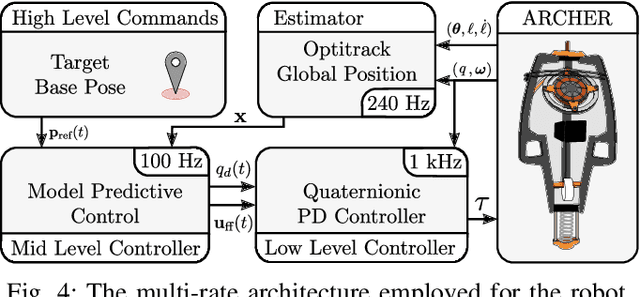
Achieving stable hopping has been a hallmark challenge in the field of dynamic legged locomotion. Controlled hopping is notably difficult due to extended periods of underactuation, combined with very short ground phases wherein ground interactions must be modulated to regulate global state. In this work, we explore the use of hybrid nonlinear model predictive control, paired with a low-level feedback controller in a multi-rate hierarchy, to achieve dynamically stable motions on a novel 3D hopping robot. In order to demonstrate richer behaviors on the manifold of rotations, both the planning and feedback layers must be done in a geometrically consistent fashion; therefore, we develop the necessary tools to employ Lie group integrators and an appropriate feedback controller. We experimentally demonstrate stable 3D hopping on a novel robot, as well as trajectory tracking and flipping in simulation.