 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Near-Space Communication Network in the 6G and Beyond Era
May 18, 2025Near-space communication network (NS-ComNet), as an indispensable component of sixth-generation (6G) and beyond mobile communication systems and the space-air-ground-sea integrated network (SAGSIN), demonstrates unique advantages in wide-area coverage, long-endurance high-altitude operation, and highly flexible deployment. This paper presents a comprehensive review of NS-ComNet for 6G and beyond era. Specifically, by contrasting satellite, low-altitude unmanned-aerial-vehicle (UAV), and terrestrial communications, we first elucidate the background and motivation for integrating NS-ComNet into 6G network architectures. Subsequently, we review the developmental status of near-space platforms, including high-altitude balloons, solar-powered UAVs, and stratospheric airships, and analyze critical challenges faced by NS-ComNet. To address these challenges, the research focuses on key enabling technologies such as topology design, resource and handover management, multi-objective joint optimization, etc., with particular emphasis on artificial intelligence techniques for NS-ComNet. Finally, envisioning future intelligent collaborative networks that integrate NS-ComNet with satellite-UAV-terrestrial systems, we explore promising directions. This paper aims to provide technical insights and research foundations for the systematic construction of NS-ComNet and its deep deployment in the 6G and beyond era.
IM-GIV: an effective integrity monitoring scheme for tightly-coupled GNSS/INS/Vision integration based on factor graph optimization
Oct 30, 2024Global Navigation Satellite System/Inertial Navigation System (GNSS/INS)/Vision integration based on factor graph optimization (FGO) has recently attracted extensive attention in navigation and robotics community. Integrity monitoring (IM) capability is required when FGO-based integrated navigation system is used for safety-critical applications. However, traditional researches on IM of integrated navigation system are mostly based on Kalman filter. It is urgent to develop effective IM scheme for FGO-based GNSS/INS/Vision integration. In this contribution, the position error bounding formula to ensure the integrity of the GNSS/INS/Vision integration based on FGO is designed and validated for the first time. It can be calculated by the linearized equations from the residuals of GNSS pseudo-range, IMU pre-integration and visual measurements. The specific position error bounding is given in the case of GNSS, INS and visual measurement faults. Field experiments were conducted to evaluate and validate the performance of the proposed position error bounding. Experimental results demonstrate that the proposed position error bounding for the GNSS/INS/Vision integration based on FGO can correctly fit the position error against different fault modes, and the availability of integrity in six fault modes is 100% after correct and timely fault exclusion.
Near-Space Communications: The Last Piece of 6G Space-Air-Ground-Sea Integrated Network Puzzle
Dec 30, 2023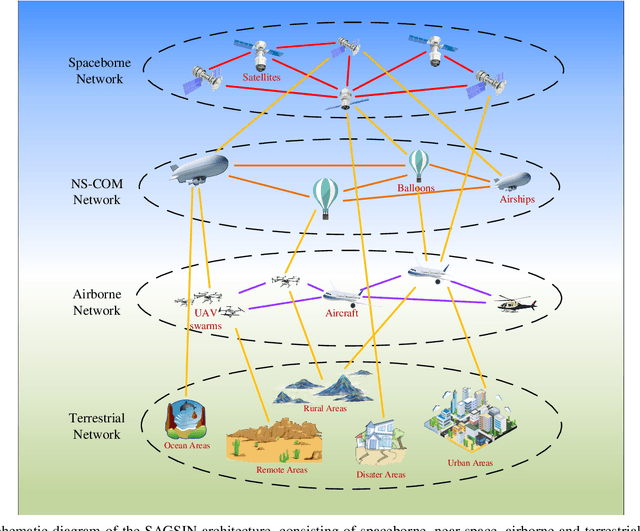
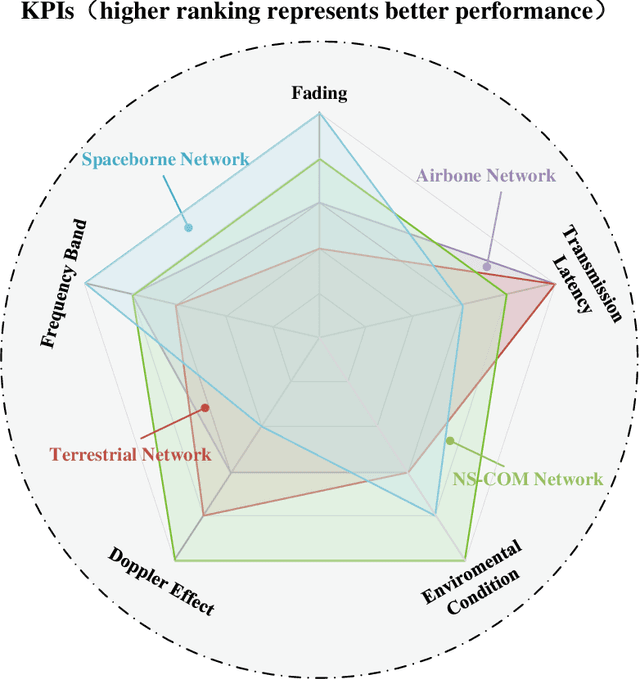
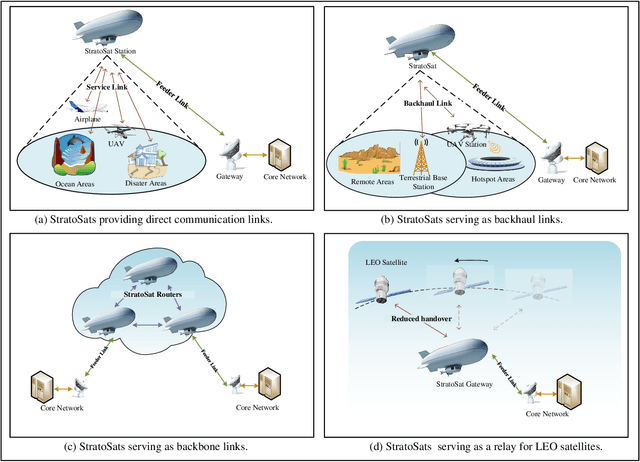
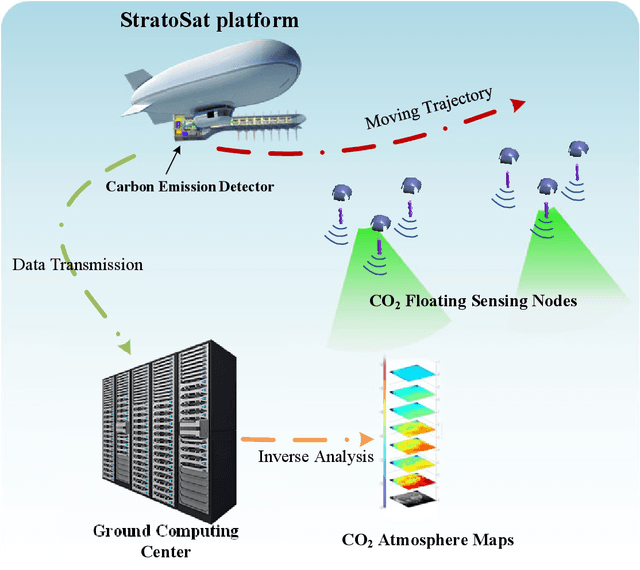
This article presents a comprehensive study on the emerging near-space communications (NS-COM) within the context of space-air-ground-sea integrated network (SAGSIN). Specifically, we firstly explore the recent technical developments of NS-COM, followed by the discussions about motivations behind integrating NS-COM into SAGSIN. To further demonstrate the necessity of NS-COM, a comparative analysis between the NS-COM network and other counterparts in SAGSIN is conducted, covering aspects of deployment, coverage and channel characteristics. Afterwards, the technical aspects of NS-COM, including channel modeling, random access, channel estimation, array-based beam management and joint network optimization, are examined in detail. Furthermore, we explore the potential applications of NS-COM, such as structural expansion in SAGSIN communications, remote and urgent communications, weather monitoring and carbon neutrality. Finally, some promising research avenues are identified, including near-space-ground direct links, reconfigurable multiple input multiple output (MIMO) array, federated learning assisted NS-COM, maritime communication and free space optical (FSO) communication. Overall, this paper highlights that the NS-COM plays an indispensable role in the SAGSIN puzzle, providing substantial performance and coverage enhancement to the traditional SAGSIN architecture.
Sensing User's Channel and Location with Terahertz Extra-Large Reconfigurable Intelligent Surface under Hybrid-Field Beam Squint Effect
May 23, 2023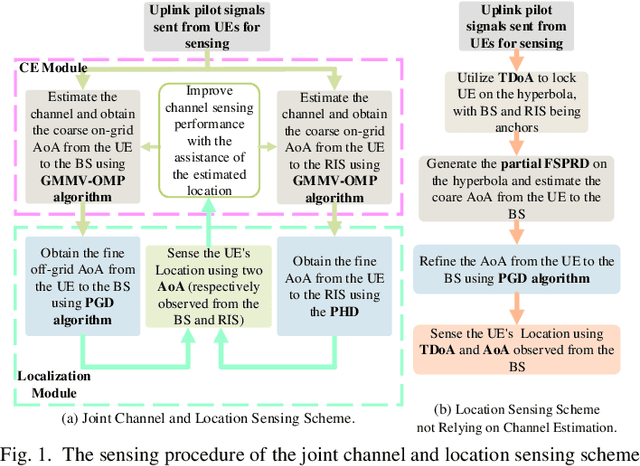
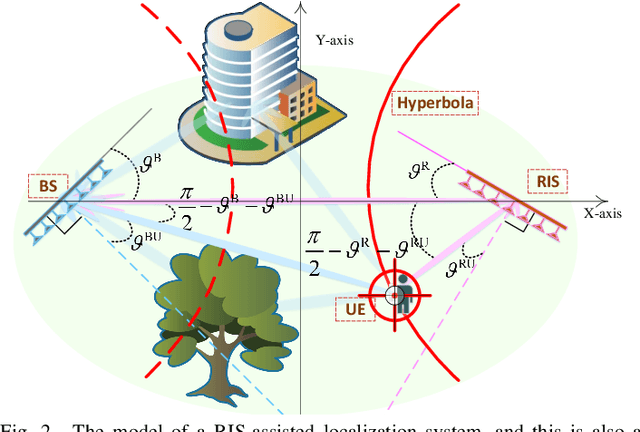
This paper investigates the sensing of user's uplink channel and location in terahertz extra-large reconfigurable intelligent surface (XL-RIS) systems, where the unique hybrid far-near field effect and the beam squint effect caused by the XL array aperture as well as the XL bandwidth are overcome. Specifically, we first propose a joint channel and location sensing scheme, which consists of a location-assisted generalized multiple measurement vector orthogonal matching pursuit (LA-GMMV-OMP) algorithm for channel estimation (CE) and a complete dictionary based localization (CDL) scheme, where a frequency selective polar-domain redundant dictionary is proposed to overcome the hybrid field beam squint effect. The CE module outputs coarse on-grid angle estimation (respectively observed from the BS and RIS) to the localization module, which returns the fine off-grid angle estimation to improve CE. Particularly, with RIS, CDL can obtain user's location via line intersection, and a polar-domain gradient descent (PGD) algorithm at the base station is proposed to achieve the off-grid angle estimation with super-resolution accuracy. Additionally, to further reduce the sensing overhead, we propose a partial dictionary-based localization scheme, which is decoupled from CE, where RIS is served as an anchor to lock the user on the hyperbola according to time difference of arrival and the user's off-grid location can be obtained by using the proposed PGD algorithm. Simulation results demonstrate the superiority of the two proposed localization schemes and the proposed CE scheme over state-of-the-art baseline approaches.