 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Multimodal Multi-Sensor Fusion-Based UAV Identification, Localization, and Countermeasures for Safeguarding Low-Altitude Economy
Oct 27, 2025The development of the low-altitude economy has led to a growing prominence of uncrewed aerial vehicle (UAV) safety management issues. Therefore, accurate identification, real-time localization, and effective countermeasures have become core challenges in airspace security assurance. This paper introduces an integrated UAV management and control system based on deep learning, which integrates multimodal multi-sensor fusion perception, precise positioning, and collaborative countermeasures. By incorporating deep learning methods, the system combines radio frequency (RF) spectral feature analysis, radar detection, electro-optical identification, and other methods at the detection level to achieve the identification and classification of UAVs. At the localization level, the system relies on multi-sensor data fusion and the air-space-ground integrated communication network to conduct real-time tracking and prediction of UAV flight status, providing support for early warning and decision-making. At the countermeasure level, it adopts comprehensive measures that integrate ``soft kill'' and ``hard kill'', including technologies such as electromagnetic signal jamming, navigation spoofing, and physical interception, to form a closed-loop management and control process from early warning to final disposal, which significantly enhances the response efficiency and disposal accuracy of low-altitude UAV management.
Chirp Delay-Doppler Domain Modulation: A New Paradigm of Integrated Sensing and Communication for Autonomous Vehicles
May 22, 2025Autonomous driving is reshaping the way humans travel, with millimeter wave (mmWave) radar playing a crucial role in this transformation to enabe vehicle-to-everything (V2X). Although chirp is widely used in mmWave radar systems for its strong sensing capabilities, the lack of integrated communication functions in existing systems may limit further advancement of autonomous driving. In light of this, we first design ``dedicated chirps" tailored for sensing chirp signals in the environment, facilitating the identification of idle time-frequency resources. Based on these dedicated chirps, we propose a chirp-division multiple access (Chirp-DMA) scheme, enabling multiple pairs of mmWave radar transceivers to perform integrated sensing and communication (ISAC) without interference. Subsequently, we propose two chirp-based delay-Doppler domain modulation schemes that enable each pair of mmWave radar transceivers to simultaneously sense and communicate within their respective time-frequency resource blocks. The modulation schemes are based on different multiple-input multiple-output (MIMO) radar schemes: the time division multiplexing (TDM)-based scheme offers higher communication rates, while the Doppler division multiplexing (DDM)-based scheme is suitable for working in a lower signal-to-noise ratio range. We then validate the effectiveness of the proposed DDM-based scheme through simulations. Finally, we present some challenges and issues that need to be addressed to advance ISAC in V2X for better autonomous driving. Simulation codes are provided to reproduce the results in this paper: \href{https://github.com/LiZhuoRan0/2025-IEEE-Network-ChirpDelayDopplerModulationISAC}{https://github.com/LiZhuoRan0}.
Near-Space Communications: The Last Piece of 6G Space-Air-Ground-Sea Integrated Network Puzzle
Dec 30, 2023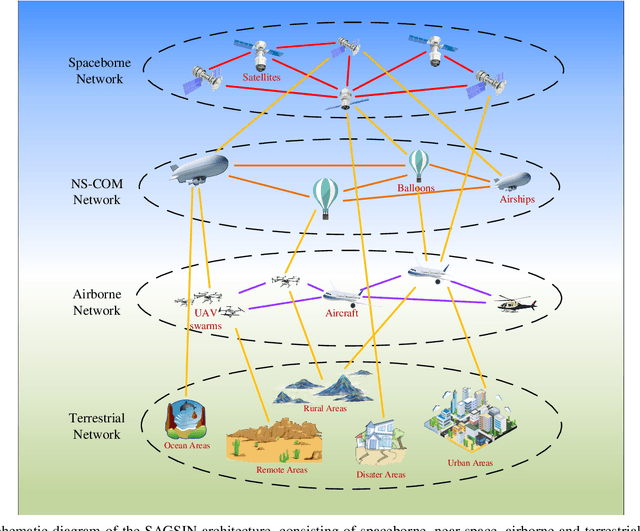
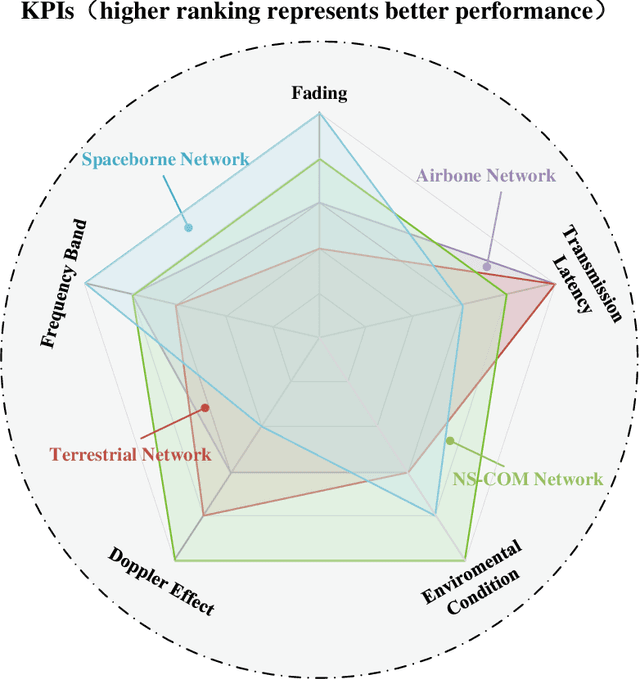
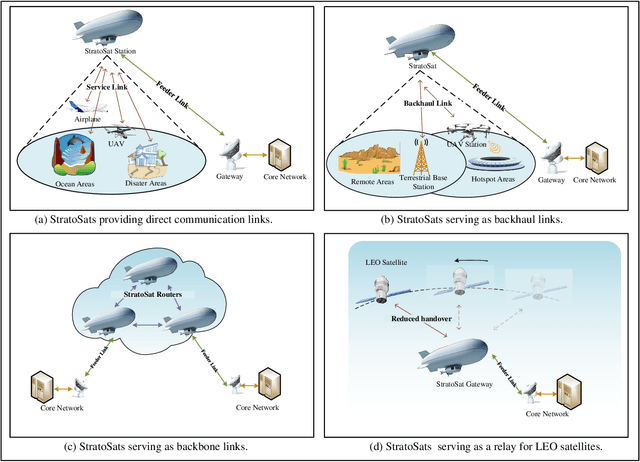
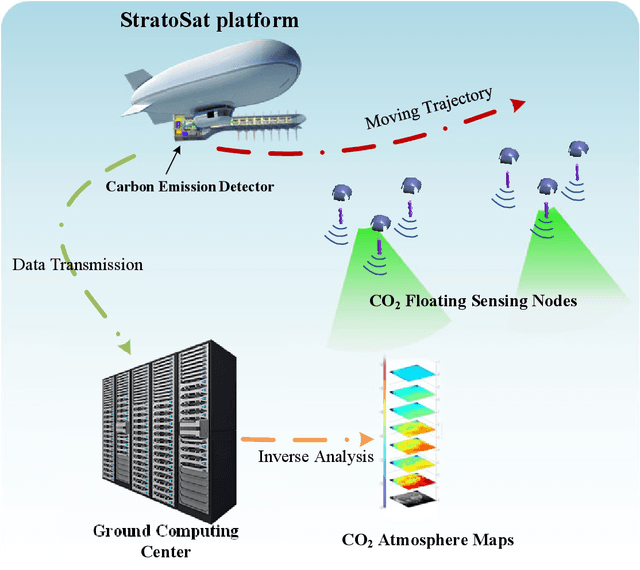
This article presents a comprehensive study on the emerging near-space communications (NS-COM) within the context of space-air-ground-sea integrated network (SAGSIN). Specifically, we firstly explore the recent technical developments of NS-COM, followed by the discussions about motivations behind integrating NS-COM into SAGSIN. To further demonstrate the necessity of NS-COM, a comparative analysis between the NS-COM network and other counterparts in SAGSIN is conducted, covering aspects of deployment, coverage and channel characteristics. Afterwards, the technical aspects of NS-COM, including channel modeling, random access, channel estimation, array-based beam management and joint network optimization, are examined in detail. Furthermore, we explore the potential applications of NS-COM, such as structural expansion in SAGSIN communications, remote and urgent communications, weather monitoring and carbon neutrality. Finally, some promising research avenues are identified, including near-space-ground direct links, reconfigurable multiple input multiple output (MIMO) array, federated learning assisted NS-COM, maritime communication and free space optical (FSO) communication. Overall, this paper highlights that the NS-COM plays an indispensable role in the SAGSIN puzzle, providing substantial performance and coverage enhancement to the traditional SAGSIN architecture.
Hybrid Knowledge-Data Driven Channel Semantic Acquisition and Beamforming for Cell-Free Massive MIMO
Jul 21, 2023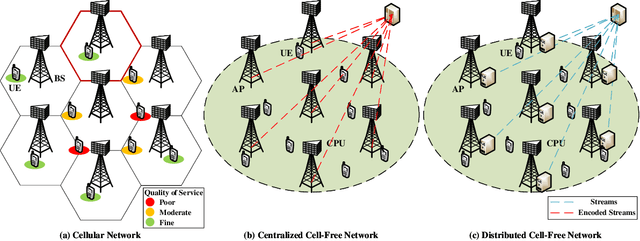
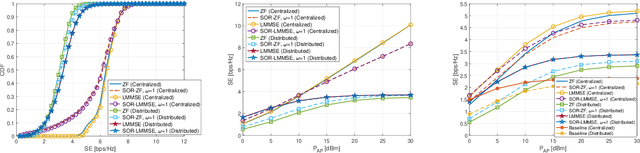
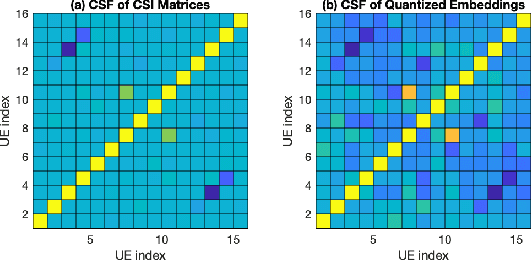
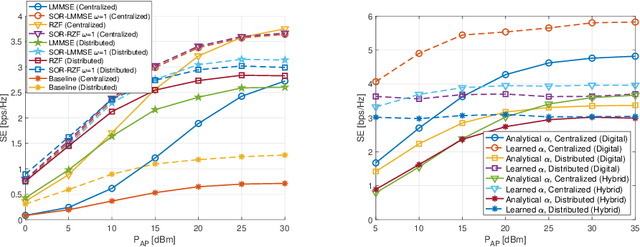
This paper focuses on advancing outdoor wireless systems to better support ubiquitous extended reality (XR) applications, and close the gap with current indoor wireless transmission capabilities. We propose a hybrid knowledge-data driven method for channel semantic acquisition and multi-user beamforming in cell-free massive multiple-input multiple-output (MIMO) systems. Specifically, we firstly propose a data-driven multiple layer perceptron (MLP)-Mixer-based auto-encoder for channel semantic acquisition, where the pilot signals, CSI quantizer for channel semantic embedding, and CSI reconstruction for channel semantic extraction are jointly optimized in an end-to-end manner. Moreover, based on the acquired channel semantic, we further propose a knowledge-driven deep-unfolding multi-user beamformer, which is capable of achieving good spectral efficiency with robustness to imperfect CSI in outdoor XR scenarios. By unfolding conventional successive over-relaxation (SOR)-based linear beamforming scheme with deep learning, the proposed beamforming scheme is capable of adaptively learning the optimal parameters to accelerate convergence and improve the robustness to imperfect CSI. The proposed deep unfolding beamforming scheme can be used for access points (APs) with fully-digital array and APs with hybrid analog-digital array. Simulation results demonstrate the effectiveness of our proposed scheme in improving the accuracy of channel acquisition, as well as reducing complexity in both CSI acquisition and beamformer design. The proposed beamforming method achieves approximately 96% of the converged spectrum efficiency performance after only three iterations in downlink transmission, demonstrating its efficacy and potential to improve outdoor XR applications.
Unsourced Massive Access-Based Digital Over-the-Air Computation for Efficient Federated Edge Learning
May 17, 2023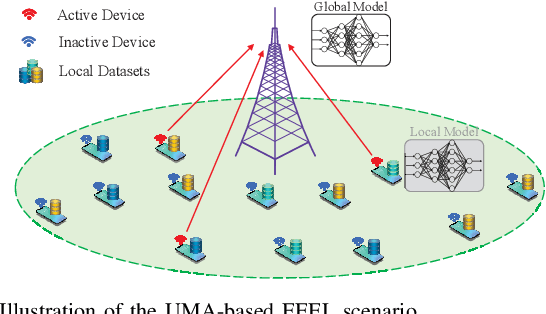
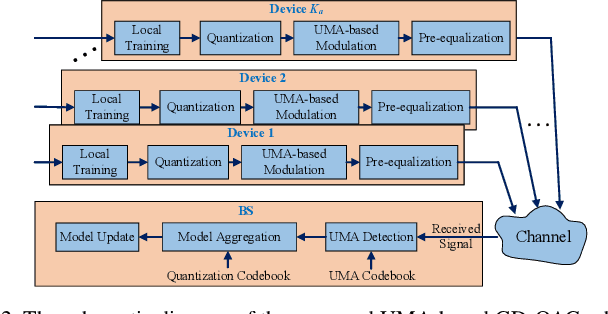
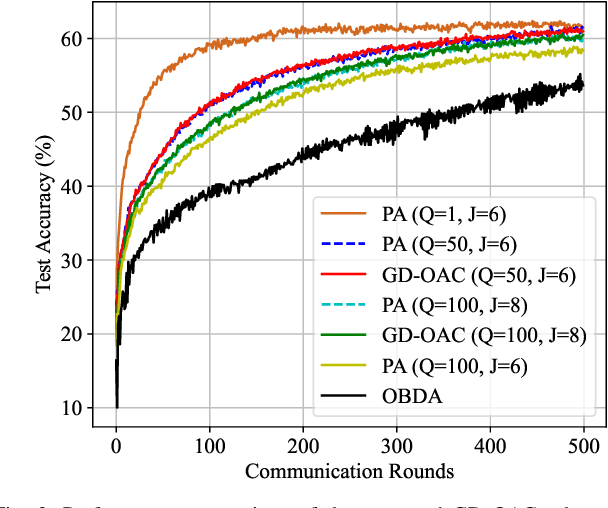
Over-the-air computation (OAC) is a promising technique to achieve fast model aggregation across multiple devices in federated edge learning (FEEL). In addition to the analog schemes, one-bit digital aggregation (OBDA) scheme was proposed to adapt OAC to modern digital wireless systems. However, one-bit quantization in OBDA can result in a serious information loss and slower convergence of FEEL. To overcome this limitation, this paper proposes an unsourced massive access (UMA)-based generalized digital OAC (GD-OAC) scheme. Specifically, at the transmitter, all the devices share the same non-orthogonal UMA codebook for uplink transmission. The local model update of each device is quantized based on the same quantization codebook. Then, each device transmits a sequence selected from the UMA codebook based on the quantized elements of its model update. At the receiver, we propose an approximate message passing-based algorithm for efficient UMA detection and model aggregation. Simulation results show that the proposed GD-OAC scheme significantly accelerates the FEEL convergences compared with the state-of-the-art OBDA scheme while using the same uplink communication resources.