 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Convolutional Neural Network with Feature Preservation and Autotuned Thresholding for Crack Detection
Apr 21, 2021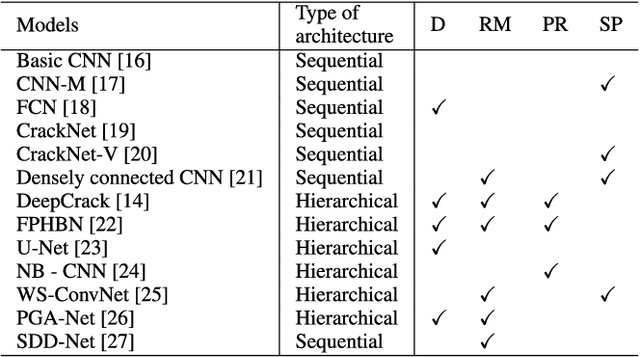
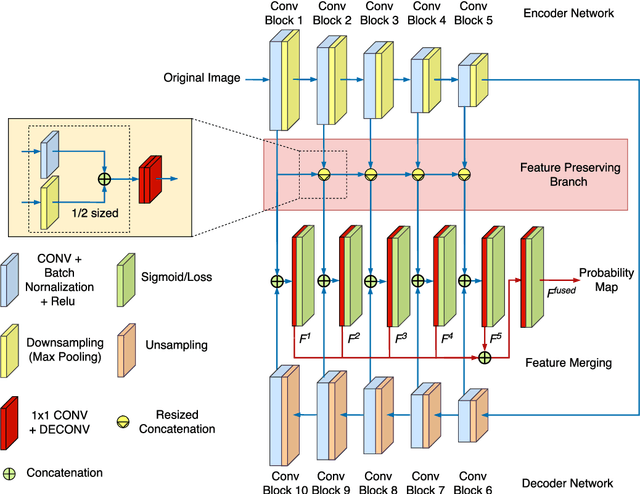
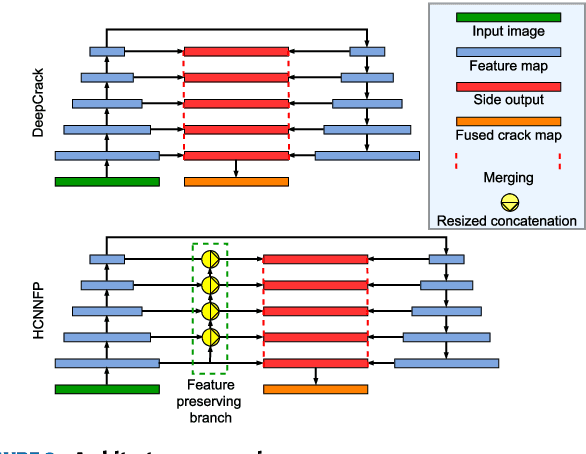
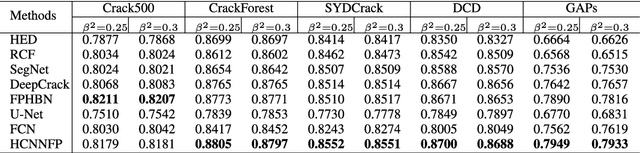
Drone imagery is increasingly used in automated inspection for infrastructure surface defects, especially in hazardous or unreachable environments. In machine vision, the key to crack detection rests with robust and accurate algorithms for image processing. To this end, this paper proposes a deep learning approach using hierarchical convolutional neural networks with feature preservation (HCNNFP) and an intercontrast iterative thresholding algorithm for image binarization. First, a set of branch networks is proposed, wherein the output of previous convolutional blocks is half-sizedly concatenated to the current ones to reduce the obscuration in the down-sampling stage taking into account the overall information loss. Next, to extract the feature map generated from the enhanced HCNN, a binary contrast-based autotuned thresholding (CBAT) approach is developed at the post-processing step, where patterns of interest are clustered within the probability map of the identified features. The proposed technique is then applied to identify surface cracks on the surface of roads, bridges or pavements. An extensive comparison with existing techniques is conducted on various datasets and subject to a number of evaluation criteria including the average F-measure (AF\b{eta}) introduced here for dynamic quantification of the performance. Experiments on crack images, including those captured by unmanned aerial vehicles inspecting a monorail bridge. The proposed technique outperforms the existing methods on various tested datasets especially for GAPs dataset with an increase of about 1.4% in terms of AF\b{eta} while the mean percentage error drops by 2.2%. Such performance demonstrates the merits of the proposed HCNNFP architecture for surface defect inspection.
System Architecture for Real-time Surface Inspection Using Multiple UAVs
Jul 07, 2019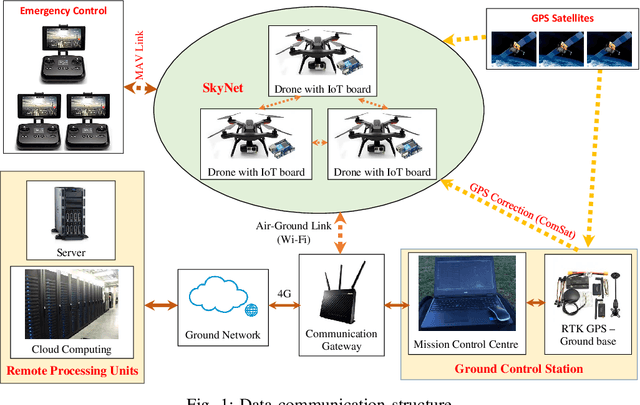
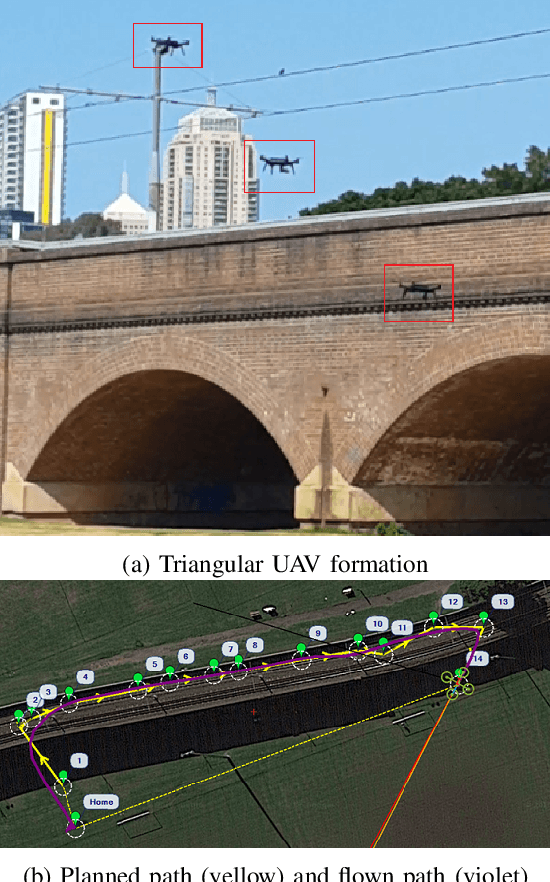
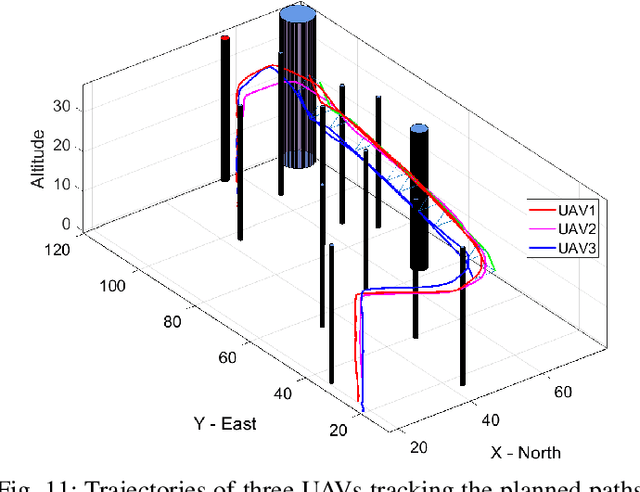
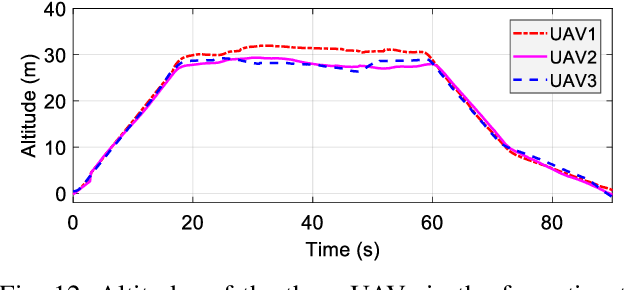
This paper presents a real-time control system for surface inspection using multiple unmanned aerial vehicles (UAVs). The UAVs are coordinated in a specific formation to collect data of the inspecting objects. The communication platform for data transmission is based on the Internet of Things (IoT). In the proposed architecture, the UAV formation is established via using the angle-encoded particle swarm optimisation to generate an inspecting path and redistribute it to each UAV where communication links are embedded with an IoT board for network and data processing capabilities. Data collected are transmitted in real time through the network to remote computational units. To detect potential damage or defects, an online image processing technique is proposed and implemented based on histograms. Extensive simulation, experiments and comparisons have been conducted to verify the validity and performance of the proposed system.
Automatic Crack Detection in Built Infrastructure Using Unmanned Aerial Vehicles
Jul 31, 2017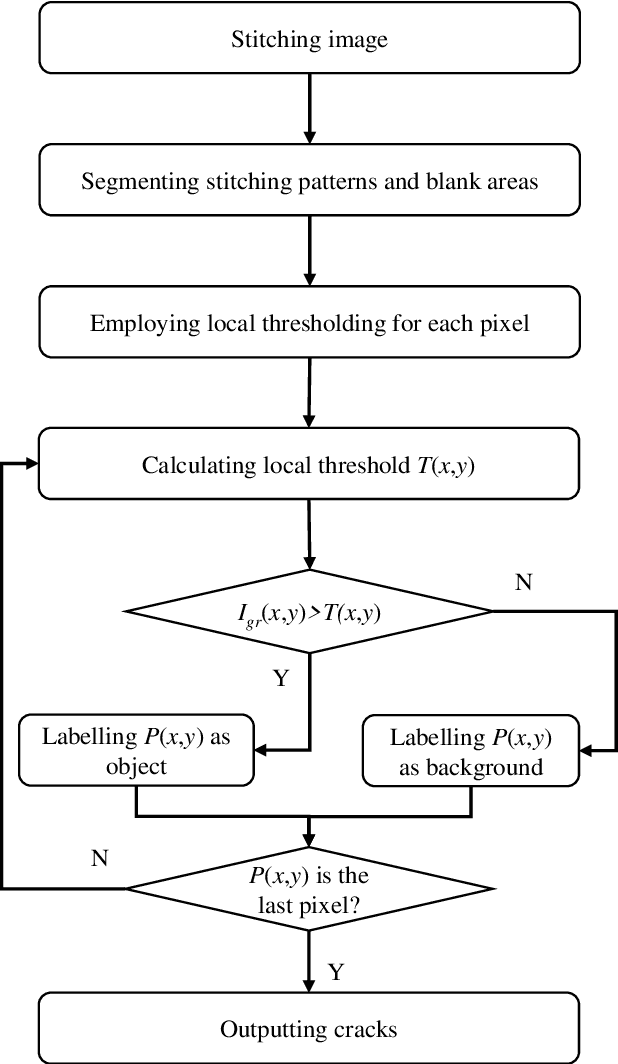

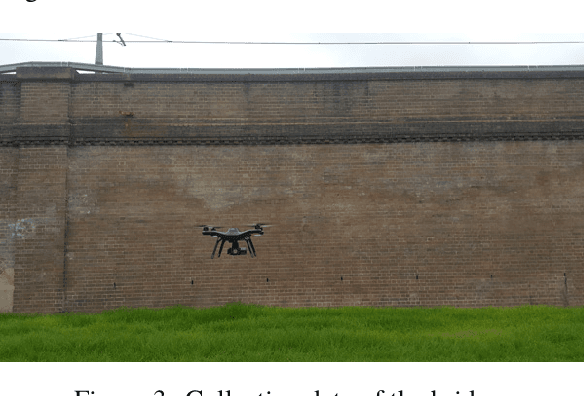
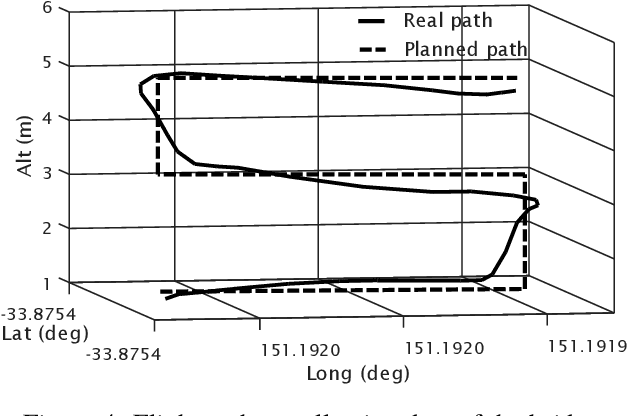
This paper addresses the problem of crack detection which is essential for health monitoring of built infrastructure. Our approach includes two stages, data collection using unmanned aerial vehicles (UAVs) and crack detection using histogram analysis. For the data collection, a 3D model of the structure is first created by using laser scanners. Based on the model, geometric properties are extracted to generate way points necessary for navigating the UAV to take images of the structure. Then, our next step is to stick together those obtained images from the overlapped field of view. The resulting image is then clustered by histogram analysis and peak detection. Potential cracks are finally identified by using locally adaptive thresholds. The whole process is automatically carried out so that the inspection time is significantly improved while safety hazards can be minimised. A prototypical system has been developed for evaluation and experimental results are included.
Enhanced discrete particle swarm optimization path planning for UAV vision-based surface inspection
Jun 14, 2017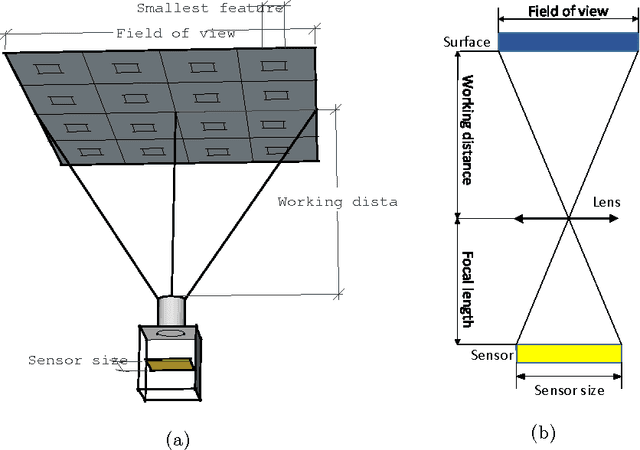
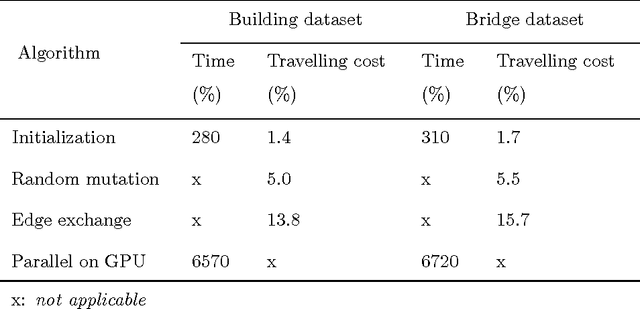
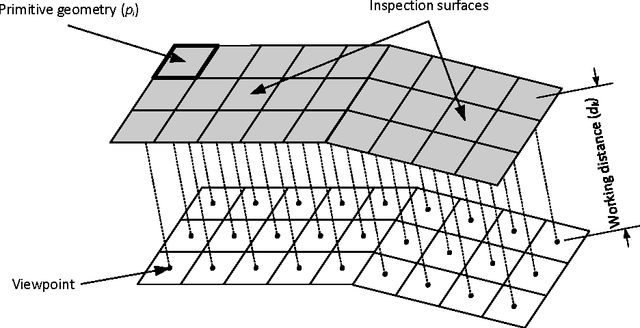
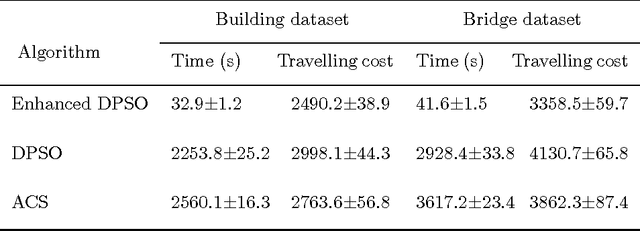
In built infrastructure monitoring, an efficient path planning algorithm is essential for robotic inspection of large surfaces using computer vision. In this work, we first formulate the inspection path planning problem as an extended travelling salesman problem (TSP) in which both the coverage and obstacle avoidance were taken into account. An enhanced discrete particle swarm optimization (DPSO) algorithm is then proposed to solve the TSP, with performance improvement by using deterministic initialization, random mutation, and edge exchange. Finally, we take advantage of parallel computing to implement the DPSO in a GPU-based framework so that the computation time can be significantly reduced while keeping the hardware requirement unchanged. To show the effectiveness of the proposed algorithm, experimental results are included for datasets obtained from UAV inspection of an office building and a bridge.
Localization of a unicycle-like mobile robot using LRF and omni-directional camera
Nov 28, 2016

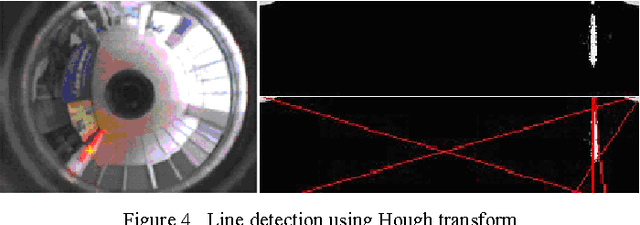
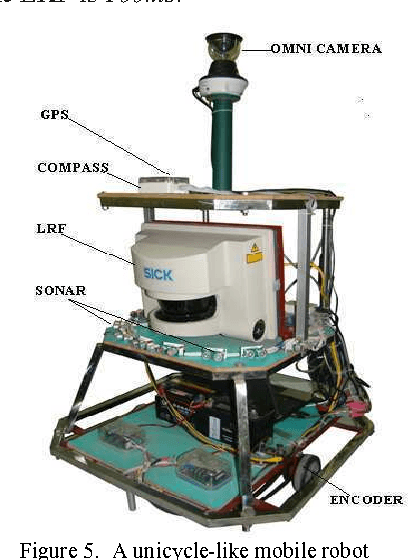
This paper addresses the localization problem. The extended Kalman filter (EKF) is employed to localize a unicycle-like mobile robot equipped with a laser range finder (LRF) sensor and an omni-directional camera. The LRF is used to scan the environment which is described with line segments. The segments are extracted by a modified least square quadratic method in which a dynamic threshold is injected. The camera is employed to determine the robot's orientation. The prediction step of the EKF is performed by extracting parameters from the kinematic model and input signal of the robot. The correction step is conducted with the implementation of a line matching algorithm and the comparison between line's parameters of the local and global maps. In the line matching algorithm, a conversion matrix is introduced to reduce the computation cost. Experiments have been carried out in a real mobile robot system and the results prove the applicability of the method for the purpose of localization.
Image segmentation based on histogram of depth and an application in driver distraction detection
Sep 01, 2016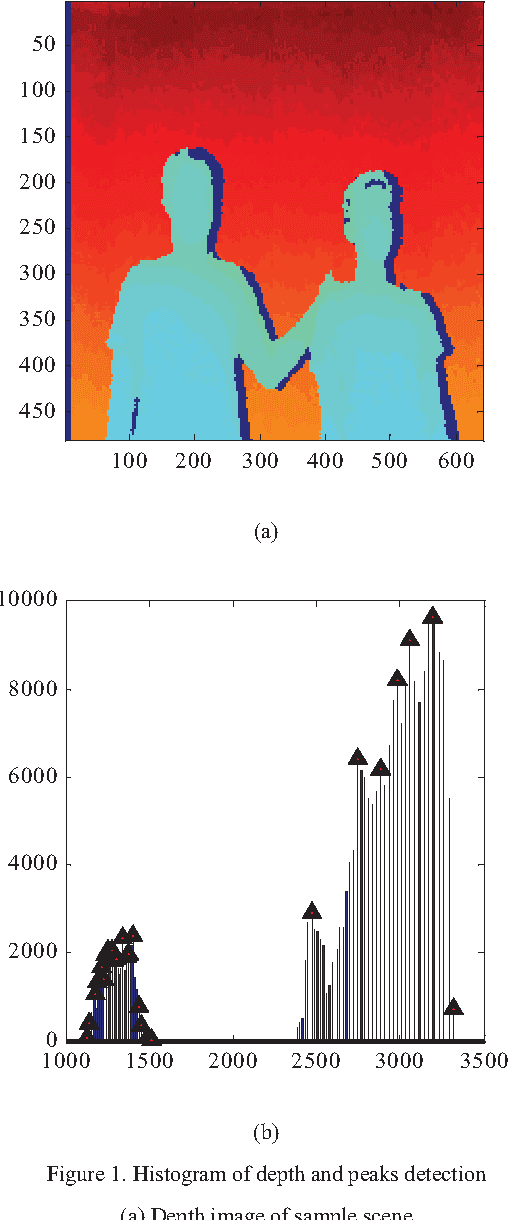
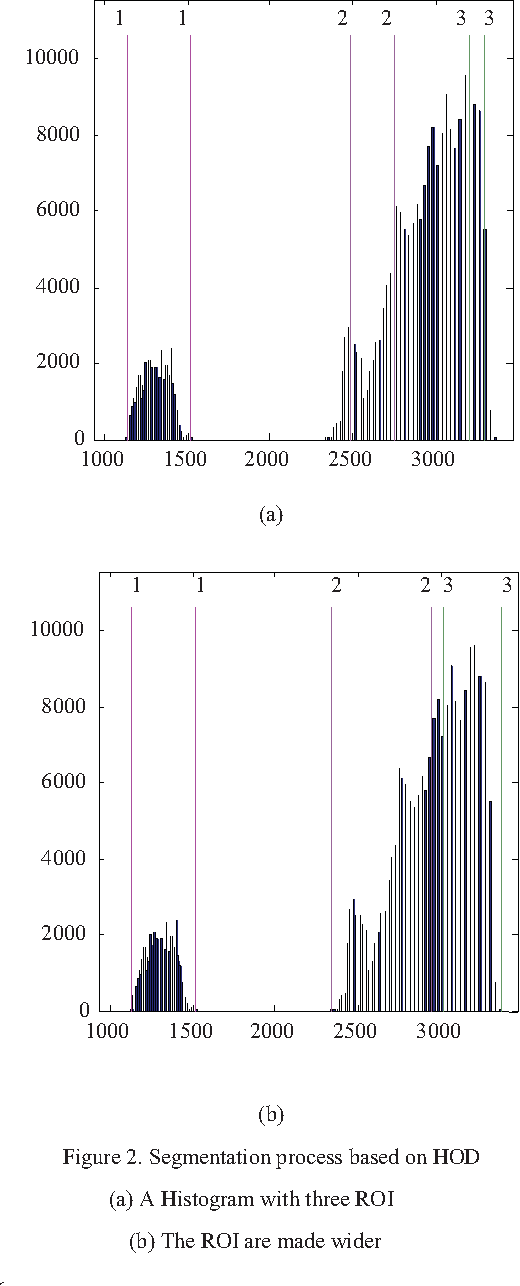
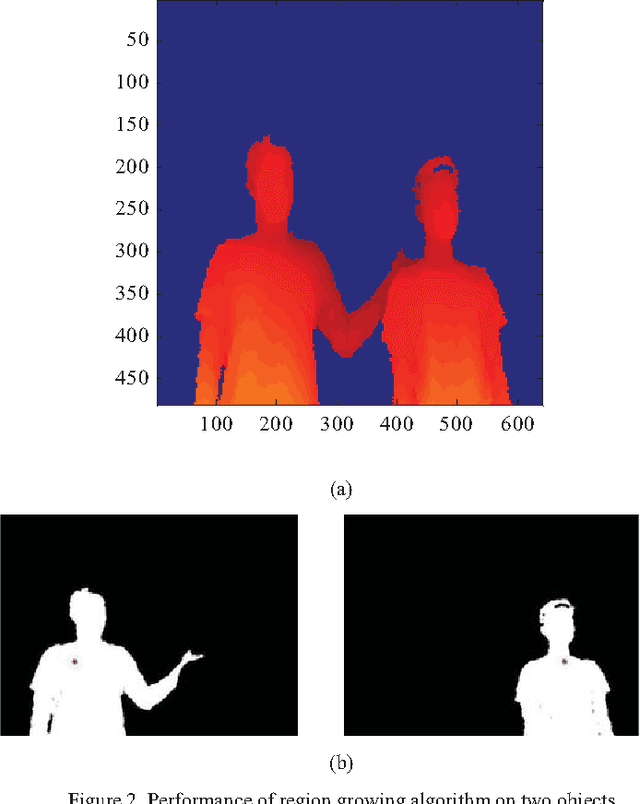
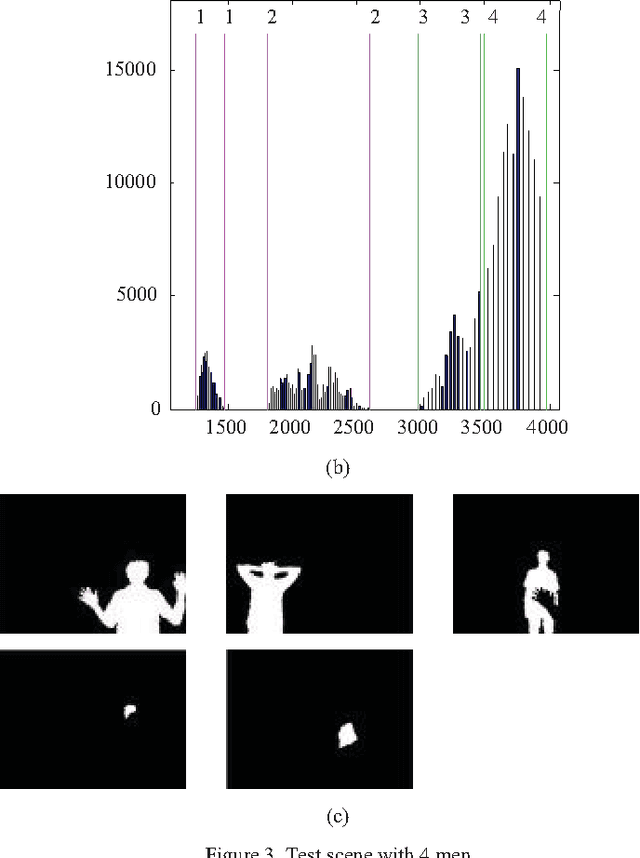
This study proposes an approach to segment human object from a depth image based on histogram of depth values. The region of interest is first extracted based on a predefined threshold for histogram regions. A region growing process is then employed to separate multiple human bodies with the same depth interval. Our contribution is the identification of an adaptive growth threshold based on the detected histogram region. To demonstrate the effectiveness of the proposed method, an application in driver distraction detection was introduced. After successfully extracting the driver's position inside the car, we came up with a simple solution to track the driver motion. With the analysis of the difference between initial and current frame, a change of cluster position or depth value in the interested region, which cross the preset threshold, is considered as a distracted activity. The experiment results demonstrated the success of the algorithm in detecting typical distracted driving activities such as using phone for calling or texting, adjusting internal devices and drinking in real time.