 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Convolutional Neural Network with Feature Preservation and Autotuned Thresholding for Crack Detection
Paper and Code
Apr 21, 2021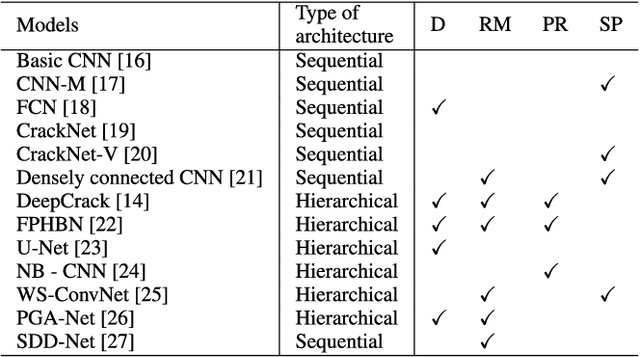
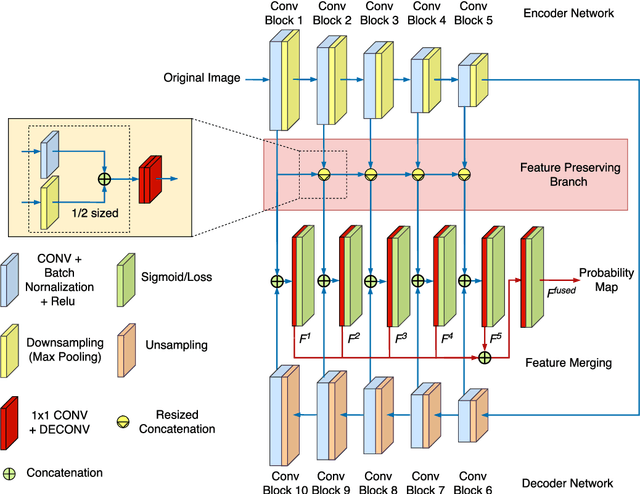
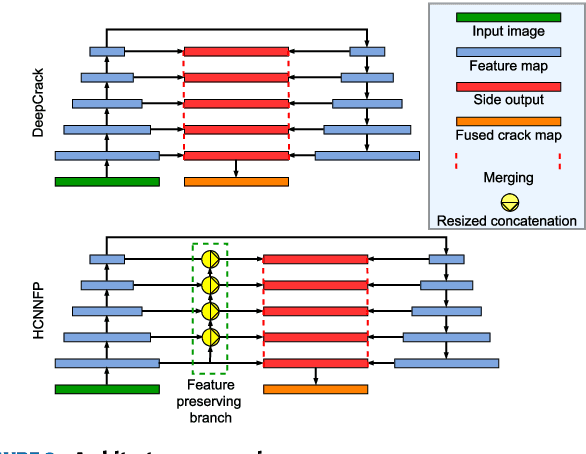
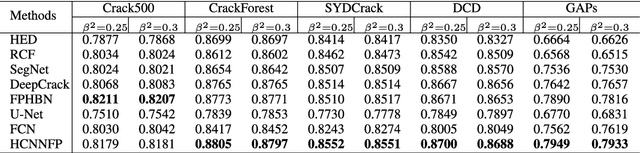
Drone imagery is increasingly used in automated inspection for infrastructure surface defects, especially in hazardous or unreachable environments. In machine vision, the key to crack detection rests with robust and accurate algorithms for image processing. To this end, this paper proposes a deep learning approach using hierarchical convolutional neural networks with feature preservation (HCNNFP) and an intercontrast iterative thresholding algorithm for image binarization. First, a set of branch networks is proposed, wherein the output of previous convolutional blocks is half-sizedly concatenated to the current ones to reduce the obscuration in the down-sampling stage taking into account the overall information loss. Next, to extract the feature map generated from the enhanced HCNN, a binary contrast-based autotuned thresholding (CBAT) approach is developed at the post-processing step, where patterns of interest are clustered within the probability map of the identified features. The proposed technique is then applied to identify surface cracks on the surface of roads, bridges or pavements. An extensive comparison with existing techniques is conducted on various datasets and subject to a number of evaluation criteria including the average F-measure (AF\b{eta}) introduced here for dynamic quantification of the performance. Experiments on crack images, including those captured by unmanned aerial vehicles inspecting a monorail bridge. The proposed technique outperforms the existing methods on various tested datasets especially for GAPs dataset with an increase of about 1.4% in terms of AF\b{eta} while the mean percentage error drops by 2.2%. Such performance demonstrates the merits of the proposed HCNNFP architecture for surface defect inspection.