 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Convolutional Neural Network with Feature Preservation and Autotuned Thresholding for Crack Detection
Apr 21, 2021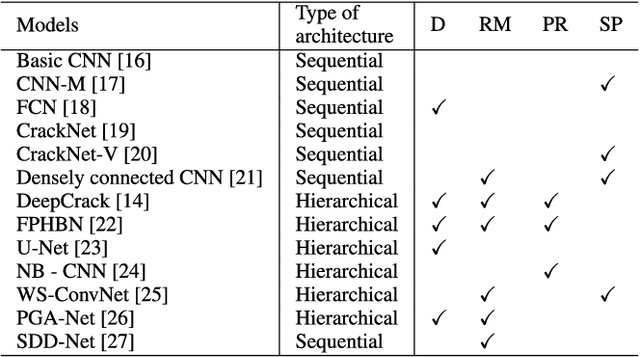
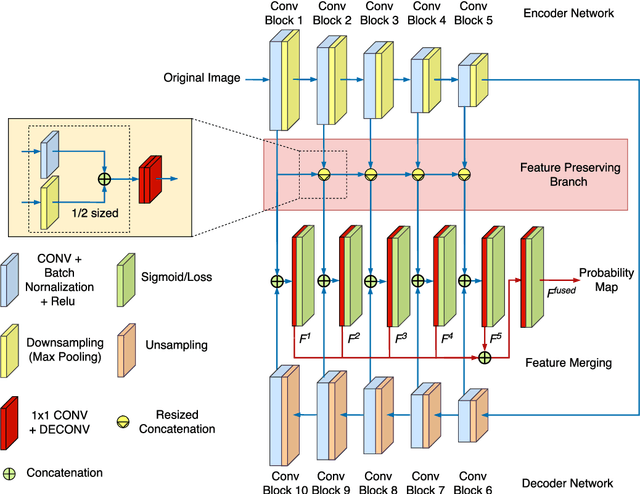
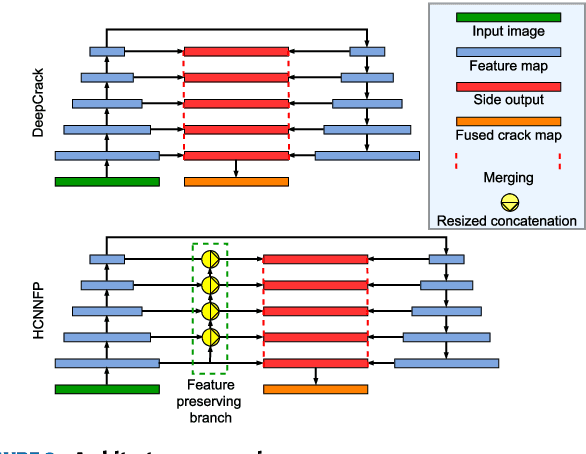
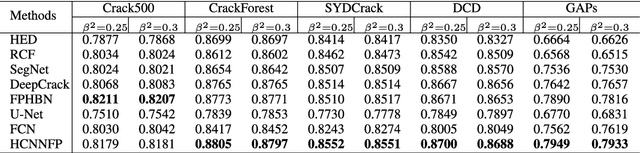
Drone imagery is increasingly used in automated inspection for infrastructure surface defects, especially in hazardous or unreachable environments. In machine vision, the key to crack detection rests with robust and accurate algorithms for image processing. To this end, this paper proposes a deep learning approach using hierarchical convolutional neural networks with feature preservation (HCNNFP) and an intercontrast iterative thresholding algorithm for image binarization. First, a set of branch networks is proposed, wherein the output of previous convolutional blocks is half-sizedly concatenated to the current ones to reduce the obscuration in the down-sampling stage taking into account the overall information loss. Next, to extract the feature map generated from the enhanced HCNN, a binary contrast-based autotuned thresholding (CBAT) approach is developed at the post-processing step, where patterns of interest are clustered within the probability map of the identified features. The proposed technique is then applied to identify surface cracks on the surface of roads, bridges or pavements. An extensive comparison with existing techniques is conducted on various datasets and subject to a number of evaluation criteria including the average F-measure (AF\b{eta}) introduced here for dynamic quantification of the performance. Experiments on crack images, including those captured by unmanned aerial vehicles inspecting a monorail bridge. The proposed technique outperforms the existing methods on various tested datasets especially for GAPs dataset with an increase of about 1.4% in terms of AF\b{eta} while the mean percentage error drops by 2.2%. Such performance demonstrates the merits of the proposed HCNNFP architecture for surface defect inspection.
Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization
Apr 13, 2021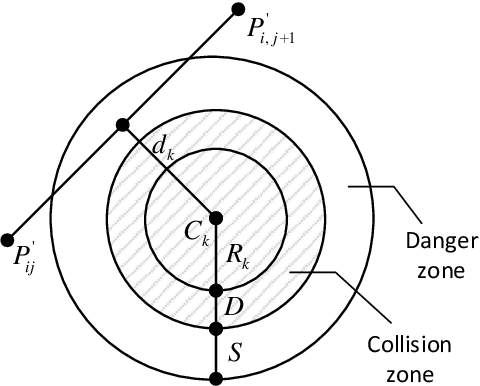
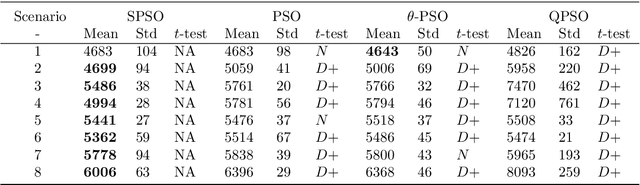
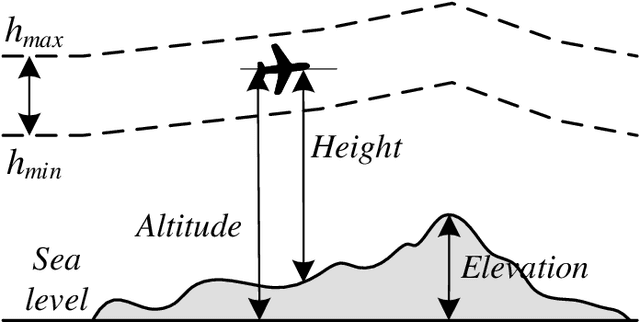
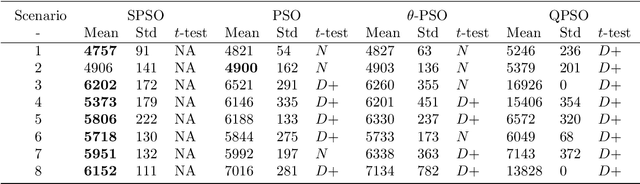
This paper presents a new algorithm named spherical vector-based particle swarm optimization (SPSO) to deal with the problem of path planning for unmanned aerial vehicles (UAVs) in complicated environments subjected to multiple threats. A cost function is first formulated to convert the path planning into an optimization problem that incorporates requirements and constraints for the feasible and safe operation of the UAV. SPSO is then used to find the optimal path that minimizes the cost function by efficiently searching the configuration space of the UAV via the correspondence between the particle position and the speed, turn angle and climb/dive angle of the UAV. To evaluate the performance of SPSO, eight benchmarking scenarios have been generated from real digital elevation model maps. The results show that the proposed SPSO outperforms not only other particle swarm optimization (PSO) variants including the classic PSO, phase angle-encoded PSO and quantum-behave PSO but also other state-of-the-art metaheuristic optimization algorithms including the genetic algorithm (GA), artificial bee colony (ABC), and differential evolution (DE) in most scenarios. In addition, experiments have been conducted to demonstrate the validity of the generated paths for real UAV operations. Source code of the algorithm can be found at https://github.com/duongpm/SPSO.
Motion-Encoded Particle Swarm Optimization for Moving Target Search Using UAVs
Oct 05, 2020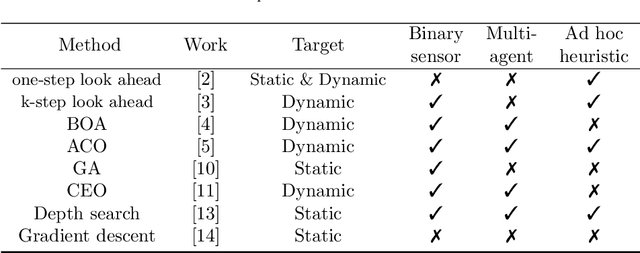
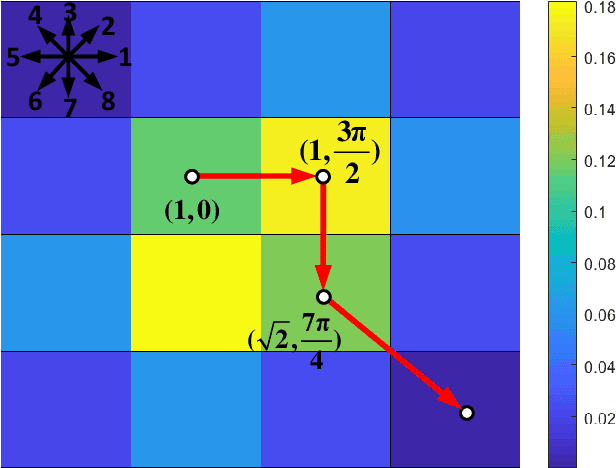
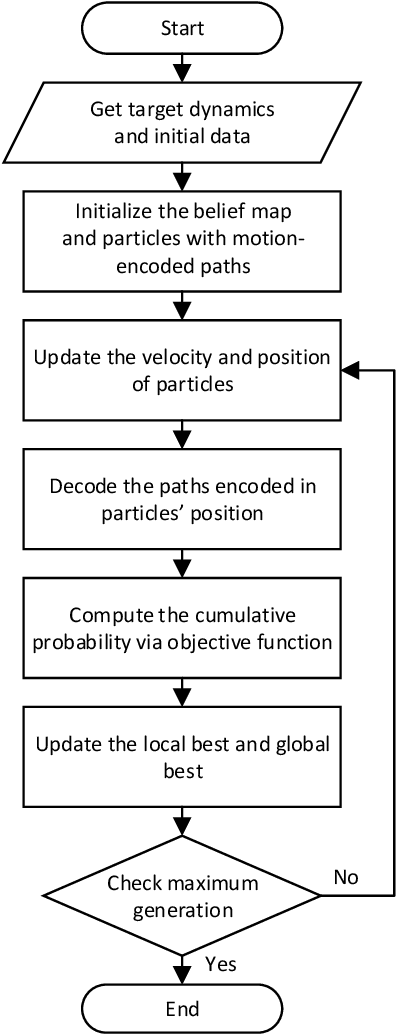
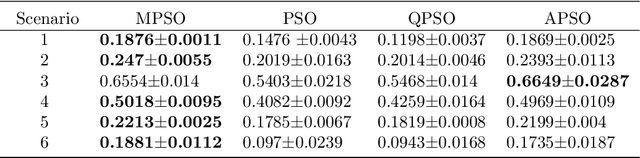
This paper presents a novel algorithm named the motion-encoded particle swarm optimization (MPSO) for finding a moving target with unmanned aerial vehicles (UAVs). From the Bayesian theory, the search problem can be converted to the optimization of a cost function that represents the probability of detecting the target. Here, the proposed MPSO is developed to solve that problem by encoding the search trajectory as a series of UAV motion paths evolving over the generation of particles in a PSO algorithm. This motion-encoded approach allows for preserving important properties of the swarm including the cognitive and social coherence, and thus resulting in better solutions. Results from extensive simulations with existing methods show that the proposed MPSO improves the detection performance by 24\% and time performance by 4.71 times compared to the original PSO, and moreover, also outperforms other state-of-the-art metaheuristic optimization algorithms including the artificial bee colony (ABC), ant colony optimization (ACO), genetic algorithm (GA), differential evolution (DE), and tree-seed algorithm (TSA) in most search scenarios. Experiments have been conducted with real UAVs in searching for a dynamic target in different scenarios to demonstrate MPSO merits in a practical application.