 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobile Robot Localization Using Fuzzy Neural Network Based Extended Kalman Filter
May 06, 2021


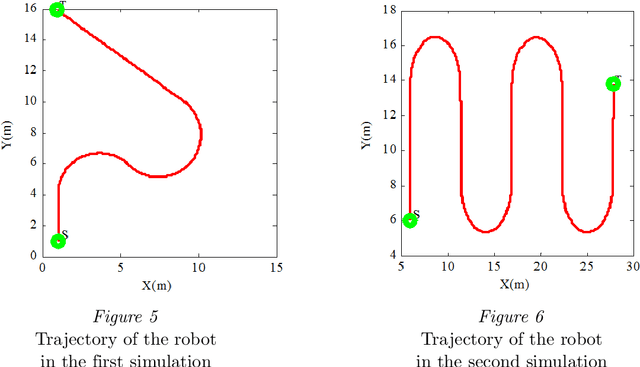
This paper proposes a novel approach to improve the performance of the extended Kalman filter (EKF) for the problem of mobile robot localization. A fuzzy logic system is employed to continuous-ly adjust the noise covariance matrices of the filter. A neural network is implemented to regulate the membership functions of the antecedent and consequent parts of the fuzzy rules. The aim is to gain the accuracy and avoid the divergence of the EKF when the noise covariance matrices are fixed or wrongly determined. Simulations and experiments have been conducted. The results show that the proposed filter is better than the EKF in localizing the mobile robot.
Development of a Fast and Robust Gaze Tracking System for Game Applications
May 06, 2021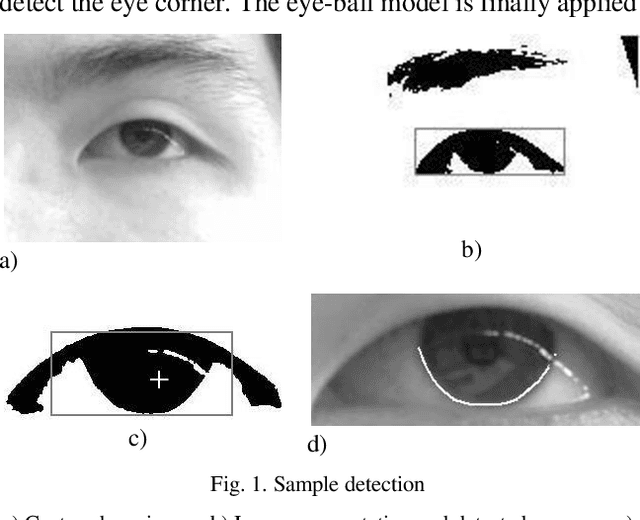
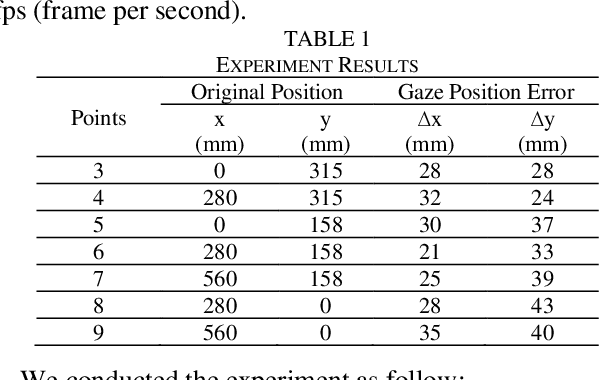
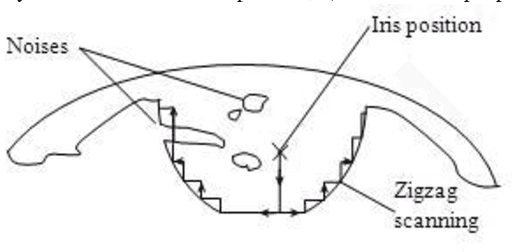
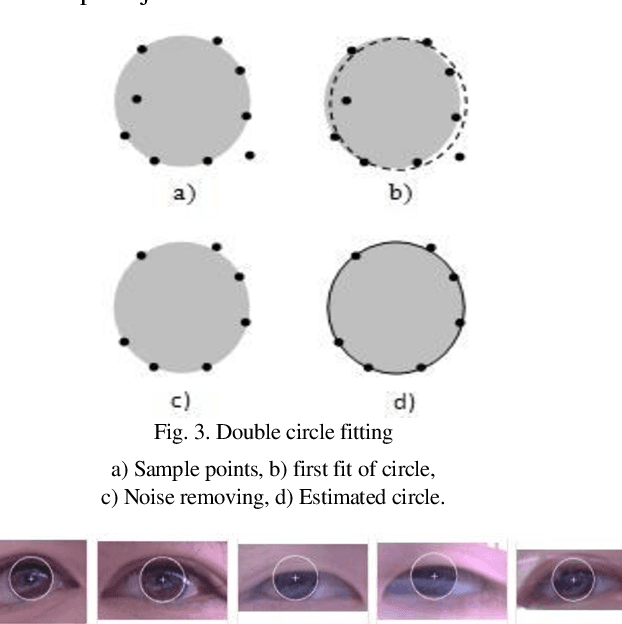
In this study, a novel eye tracking system using a visual camera is developed to extract human's gaze, and it can be used in modern game machines to bring new and innovative interactive experience to players. Central to the components of the system, is a robust iris-center and eye-corner detection algorithm basing on it the gaze is continuously and adaptively extracted. Evaluation tests were applied to nine people to evaluate the accuracy of the system and the results were 2.50 degrees (view angle) in horizontal direction and 3.07 degrees in vertical direction.
Development of a Fuzzy-based Patrol Robot Using in Building Automation System
May 13, 2020A Building Automation System (BAS) has functions of monitoring and controlling the operation of all building sub-systems such as HVAC (Heating-Ventilation, Air-conditioning Control), electric consumption management, fire alarm control, security and access control, and appliance switching control. In the BAS, almost operations are automatically performed at the control centre, the building security therefore must be strictly protected. In the traditional system, the security is usually ensured by a number of cameras installed at fixed positions and it may results in a limited vision. To overcome this disadvantage, our paper presents a novel security system in which a mobile robot is used as a patrol. The robot is equipped with fuzzy-based algorithms to allow it to avoid the obstacles in an unknown environment as well as other necessary mechanisms demanded for its patrol mission. The experiment results show that the system satisfies the requirements for the objective of monitoring and securing the building.
* in Vietnamese language
Robust asymptotic stability of two-wheels differential drive mobile robot
May 13, 2020The paper proposes the stable motion control law design method for non-honomic differential-drive mobile robot with system and measurement noise in discrete time domain. This method is performed basing on dividing operating configuration of robot into two parts: glocal and local configuration then the control law is designed following Lyapunov stable theory for two configuration. The proposed stable control laws is able to reach asymptotically stably to target position and orientation from any initial conditions even existing noise in the system. Some simulation results have demonstrated the effect of proposed method.
Using multiple sensors for autonomous mobile robot navigation
May 13, 2020This paper presents the use of multi-sensor measurement system to guide autonomous mobile robot in the house. The system allows the 3D image acquisition to global mapping, and algorithms to reduce the dimensionality of images to 2D global map navigation, trajectory design approach using the Lyapunov function method and avoid obstacles by the potential energy can also be presented. Also, sensor integrated method based on extended Kalman filter allows us to identify the exact location and orientation of the robot in the presence of interference from the environment.
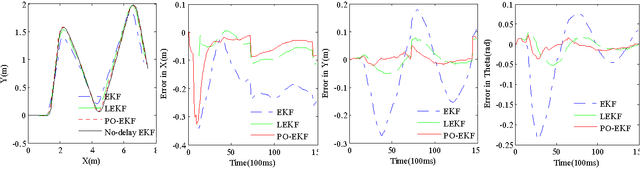
Stabilization control of networked mobile robot using past observation-based preditive filter
May 13, 2020This paper addresses the stabilization control problem for networked mobile robot subject to communication delay. A new state estimation filter namely past observation-based predictive filter is developed. This filter enables the prediction of system state from delayed measurement. The state estimator combined with developed control laws ensures the asymptotic stability of the networked system. Simulations with parameters extracted from a real robot system were conducted and results confirmed the correctness as well as applicability of proposed approach.
Localization of Internet-based Mobile Robot
Mar 10, 2017



This paper presents a new optimal filter namely past observation-based extended Kalman filter for the problem of localization of Internet-based mobile robot in which the control input and the feedback measurement suffer from communication delay. The filter operates through two phases: the time update and the data correction. The time update predicts the robot position by reformulating the kinematics model to be non-memoryless. The correction step corrects the prediction by extrapolating the delayed measurement to the present and then incorporating it to the being estimate as there is no delay. The optimality of the incorporation is ensured by the derivation of a multiplier that reflects the relevance of past observations to the present. Simulations in MATLAB and experiments in a real networked robot system confirm the validity of the proposed approach.
Behavior-based Navigation of Mobile Robot in Unknown Environments Using Fuzzy Logic and Multi-Objective Optimization
Mar 09, 2017


This study proposes behavior-based navigation architecture, named BBFM, to deal with the problem of navigating the mobile robot in unknown environments in the presence of obstacles and local minimum regions. In the architecture, the complex navigation task is split into principal sub-tasks or behaviors. Each behavior is implemented by a fuzzy controller and executed independently to deal with a specific problem of navigation. The fuzzy controller is modified to contain only the fuzzification and inference procedures so that its output is a membership function representing the behavior's objective. The membership functions of all controllers are then used as the objective functions for a multi-objective optimization process to coordinate all behaviors. The result of this process is an overall control signal, which is Pareto-optimal, used to control the robot. A number of simulations, comparisons, and experiments were conducted. The results show that the proposed architecture outperforms some popular behavior-based architectures in term of accuracy, smoothness, traveled distance, and time response.
Localization of networked robot systems subject to random delay and packet loss
Dec 03, 2016
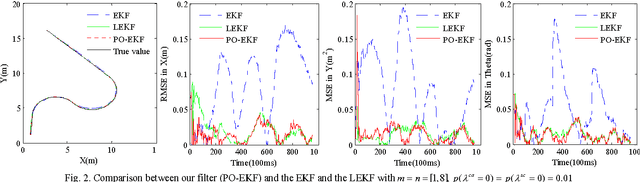

This paper deals with the localization problem of mobile robot subject to communication delay and packet loss. The delay and loss may appear in a random fashion in both control inputs and observation measurements. A unified state-space representation is constructed to describe these mixed uncertainties. Based on it, the optimal linear estimator is developed. The main idea is the derivation of a relevance factor to incorporate delayed measurements to the being estimate. The estimator is then extended for nonlinear systems. The performance of this method is tested within the simulations in MATLAB and the experiments in a real robot system. The good localization results prove the efficiency of the method for the purpose of localization of networked mobile robot.
Localization of a unicycle-like mobile robot using LRF and omni-directional camera
Nov 28, 2016

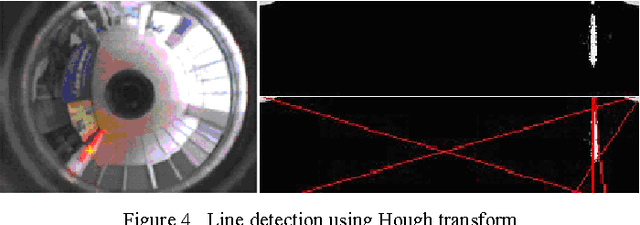
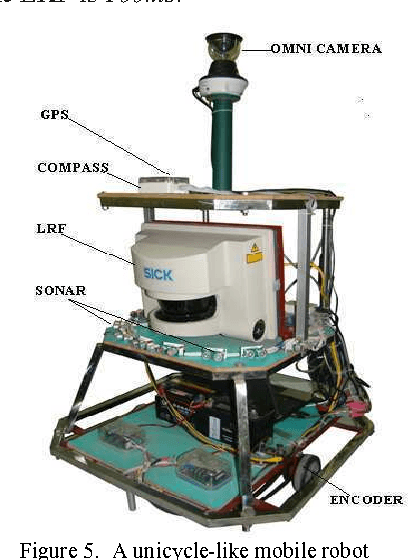
This paper addresses the localization problem. The extended Kalman filter (EKF) is employed to localize a unicycle-like mobile robot equipped with a laser range finder (LRF) sensor and an omni-directional camera. The LRF is used to scan the environment which is described with line segments. The segments are extracted by a modified least square quadratic method in which a dynamic threshold is injected. The camera is employed to determine the robot's orientation. The prediction step of the EKF is performed by extracting parameters from the kinematic model and input signal of the robot. The correction step is conducted with the implementation of a line matching algorithm and the comparison between line's parameters of the local and global maps. In the line matching algorithm, a conversion matrix is introduced to reduce the computation cost. Experiments have been carried out in a real mobile robot system and the results prove the applicability of the method for the purpose of localization.