 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecognition of 26 Degrees of Freedom of Hands Using Model-based approach and Depth-Color Images
May 13, 2020In this study, we present an model-based approach to recognize full 26 degrees of freedom of a human hand. Input data include RGB-D images acquired from a Kinect camera and a 3D model of the hand constructed from its anatomy and graphical matrices. A cost function is then defined so that its minimum value is achieved when the model and observation images are matched. To solve the optimization problem in 26 dimensional space, the particle swarm optimization algorimth with improvements are used. In addition, parallel computation in graphical processing units (GPU) is utilized to handle computationally expensive tasks. Simulation and experimental results show that the system can recognize 26 degrees of freedom of hands with the processing time of 0.8 seconds per frame. The algorithm is robust to noise and the hardware requirement is simple with a single camera.
Real-time Lane Marker Detection Using Template Matching with RGB-D Camera
Jun 05, 2018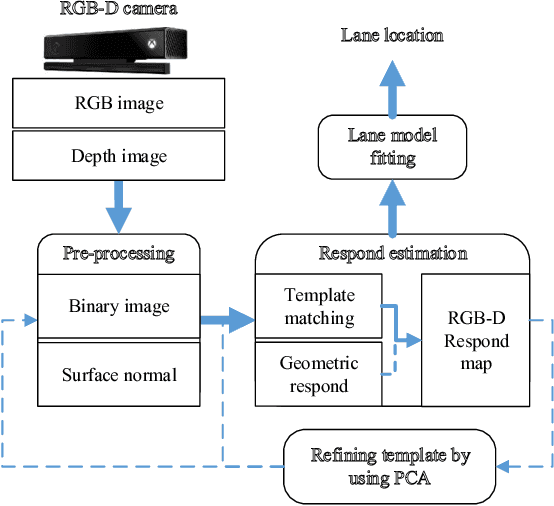
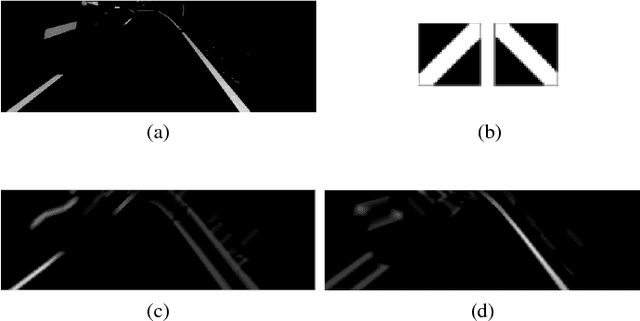
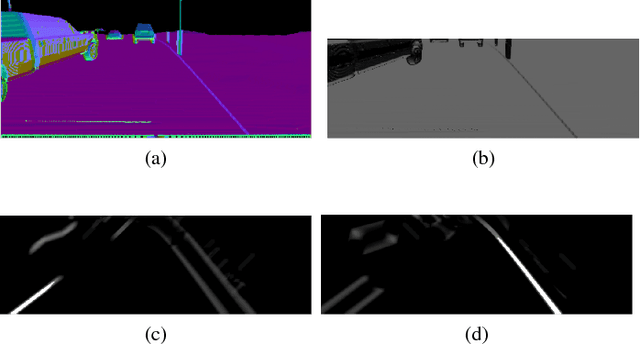
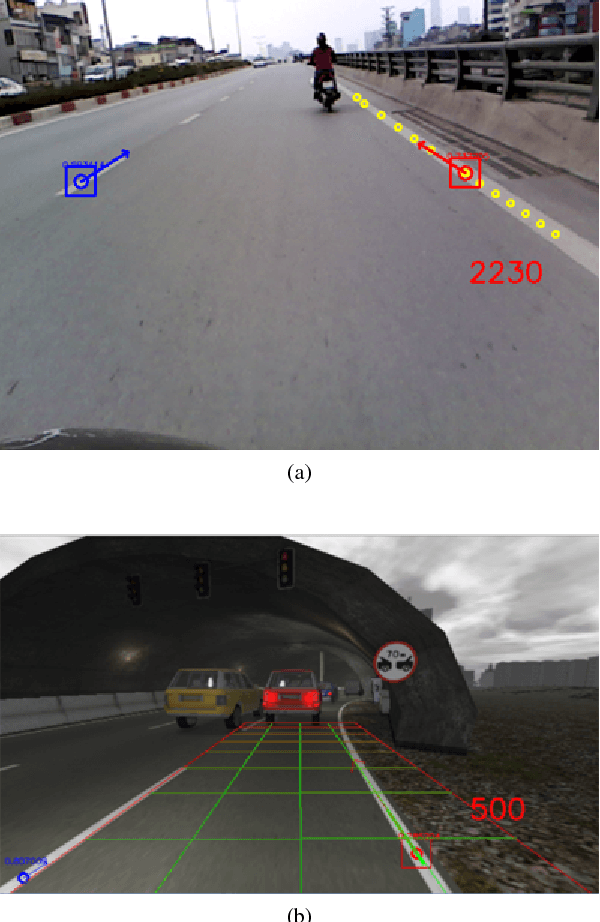
This paper addresses the problem of lane detection which is fundamental for self-driving vehicles. Our approach exploits both colour and depth information recorded by a single RGB-D camera to better deal with negative factors such as lighting conditions and lane-like objects. In the approach, colour and depth images are first converted to a half-binary format and a 2D matrix of 3D points. They are then used as the inputs of template matching and geometric feature extraction processes to form a response map so that its values represent the probability of pixels being lane markers. To further improve the results, the template and lane surfaces are finally refined by principal component analysis and lane model fitting techniques. A number of experiments have been conducted on both synthetic and real datasets. The result shows that the proposed approach can effectively eliminate unwanted noise to accurately detect lane markers in various scenarios. Moreover, the processing speed of 20 frames per second under hardware configuration of a popular laptop computer allows the proposed algorithm to be implemented for real-time autonomous driving applications.
Image segmentation based on histogram of depth and an application in driver distraction detection
Sep 01, 2016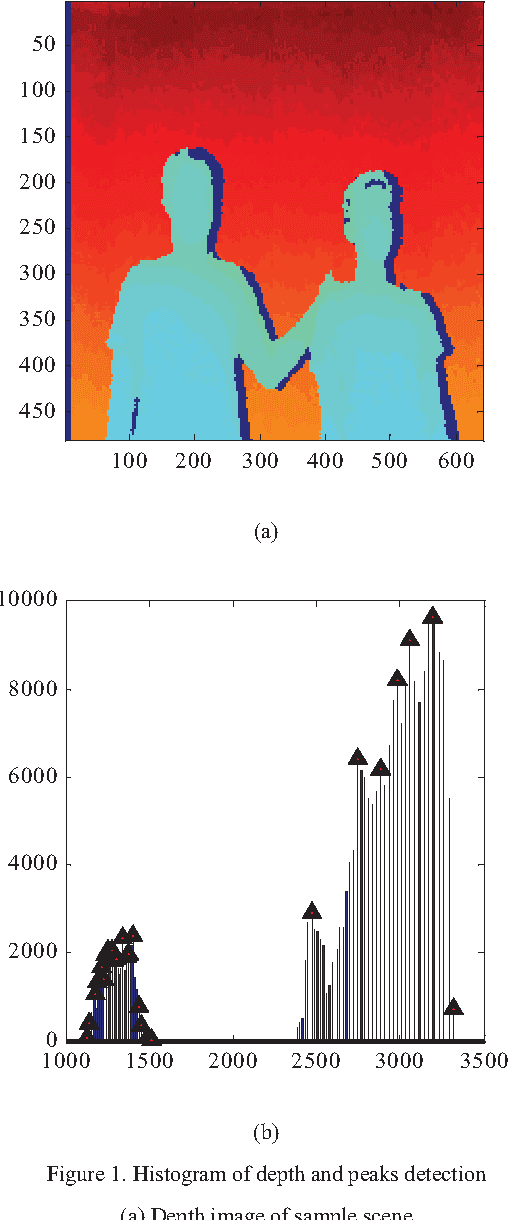
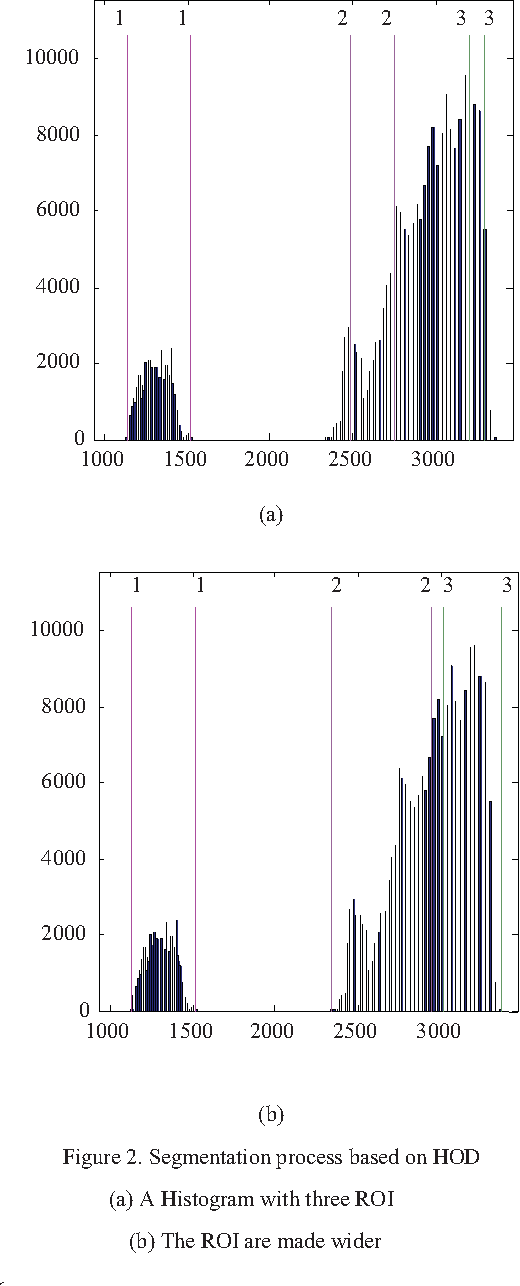
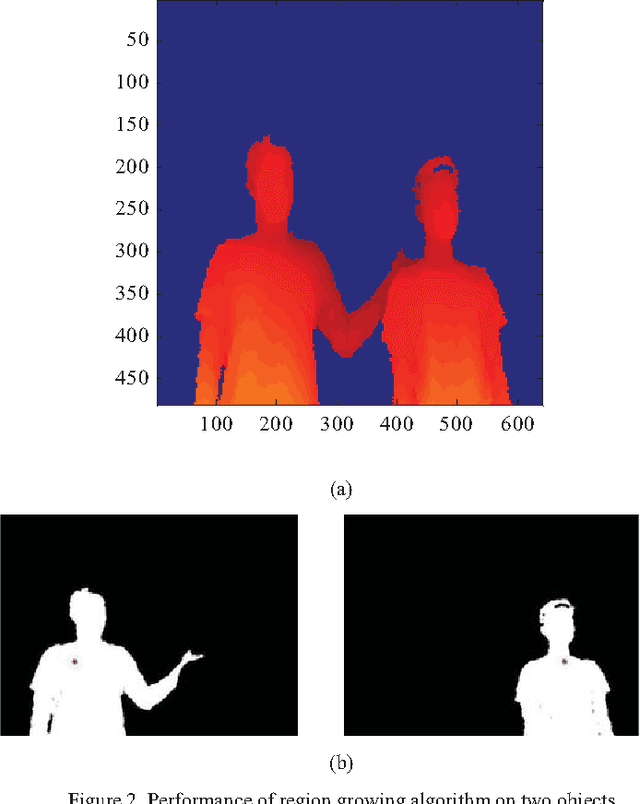
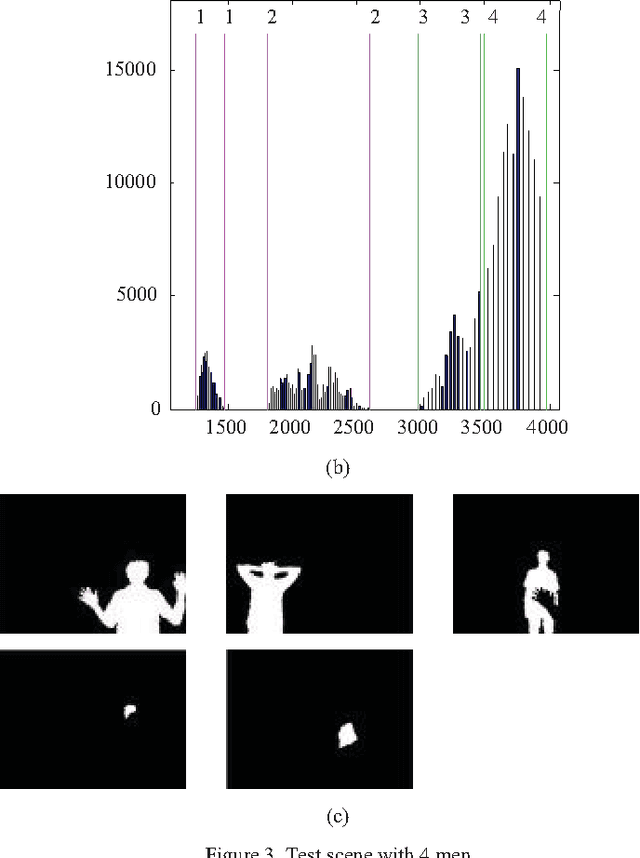
This study proposes an approach to segment human object from a depth image based on histogram of depth values. The region of interest is first extracted based on a predefined threshold for histogram regions. A region growing process is then employed to separate multiple human bodies with the same depth interval. Our contribution is the identification of an adaptive growth threshold based on the detected histogram region. To demonstrate the effectiveness of the proposed method, an application in driver distraction detection was introduced. After successfully extracting the driver's position inside the car, we came up with a simple solution to track the driver motion. With the analysis of the difference between initial and current frame, a change of cluster position or depth value in the interested region, which cross the preset threshold, is considered as a distracted activity. The experiment results demonstrated the success of the algorithm in detecting typical distracted driving activities such as using phone for calling or texting, adjusting internal devices and drinking in real time.