 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM2GAN: A Multi-Stage Self-Attention Network for Image Rain Removal on Autonomous Vehicles
Oct 12, 2021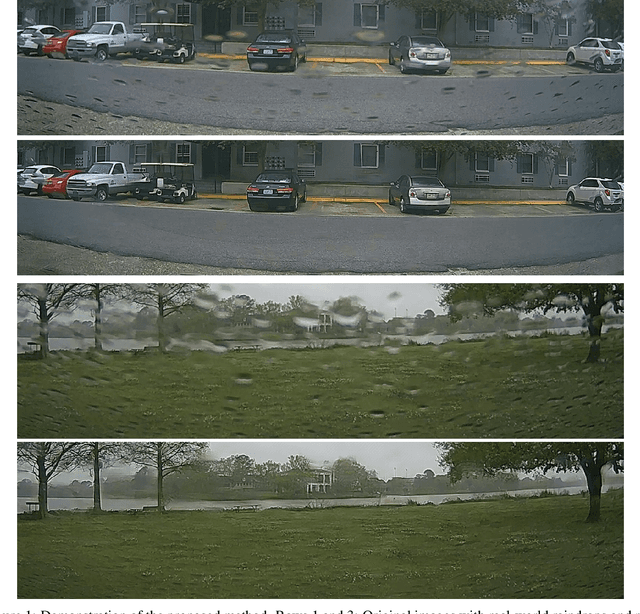
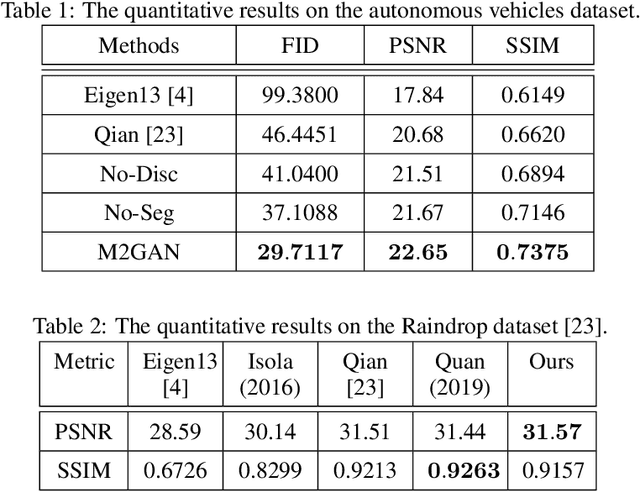
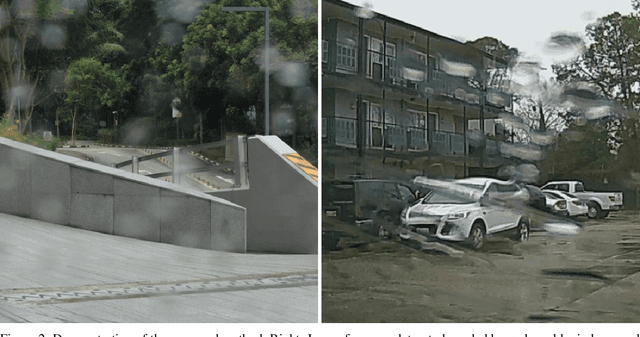
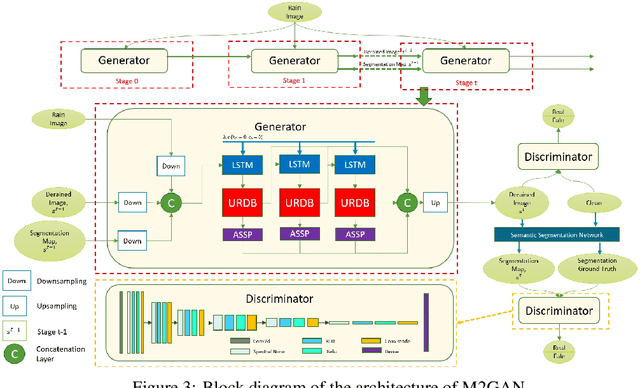
Image deraining is a new challenging problem in applications of autonomous vehicles. In a bad weather condition of heavy rainfall, raindrops, mainly hitting the vehicle's windshield, can significantly reduce observation ability even though the windshield wipers might be able to remove part of it. Moreover, rain flows spreading over the windshield can yield the physical effect of refraction, which seriously impede the sightline or undermine the machine learning system equipped in the vehicle. In this paper, we propose a new multi-stage multi-task recurrent generative adversarial network (M2GAN) to deal with challenging problems of raindrops hitting the car's windshield. This method is also applicable for removing raindrops appearing on a glass window or lens. M2GAN is a multi-stage multi-task generative adversarial network that can utilize prior high-level information, such as semantic segmentation, to boost deraining performance. To demonstrate M2GAN, we introduce the first real-world dataset for rain removal on autonomous vehicles. The experimental results show that our proposed method is superior to other state-of-the-art approaches of deraining raindrops in respect of quantitative metrics and visual quality. M2GAN is considered the first method to deal with challenging problems of real-world rains under unconstrained environments such as autonomous vehicles.
UnfairGAN: An Enhanced Generative Adversarial Network for Raindrop Removal from A Single Image
Oct 11, 2021

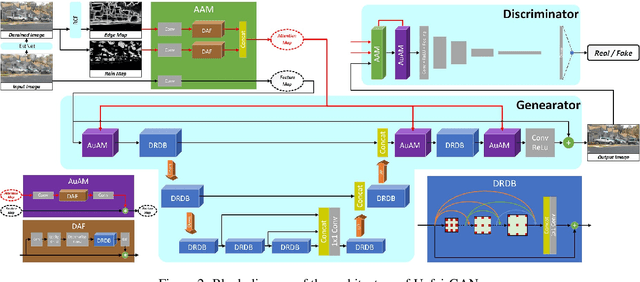
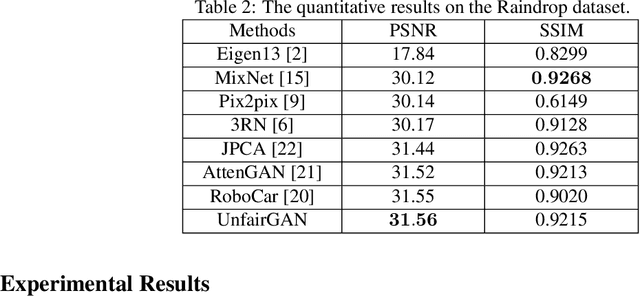
Image deraining is a new challenging problem in real-world applications, such as autonomous vehicles. In a bad weather condition of heavy rainfall, raindrops, mainly hitting glasses or windshields, can significantly reduce observation ability. Moreover, raindrops spreading over the glass can yield refraction's physical effect, which seriously impedes the sightline or undermine machine learning systems. In this paper, we propose an enhanced generative adversarial network to deal with the challenging problems of raindrops. UnfairGAN is an enhanced generative adversarial network that can utilize prior high-level information, such as edges and rain estimation, to boost deraining performance. To demonstrate UnfairGAN, we introduce a large dataset for training deep learning models of rain removal. The experimental results show that our proposed method is superior to other state-of-the-art approaches of deraining raindrops regarding quantitative metrics and visual quality.
Image segmentation based on histogram of depth and an application in driver distraction detection
Sep 01, 2016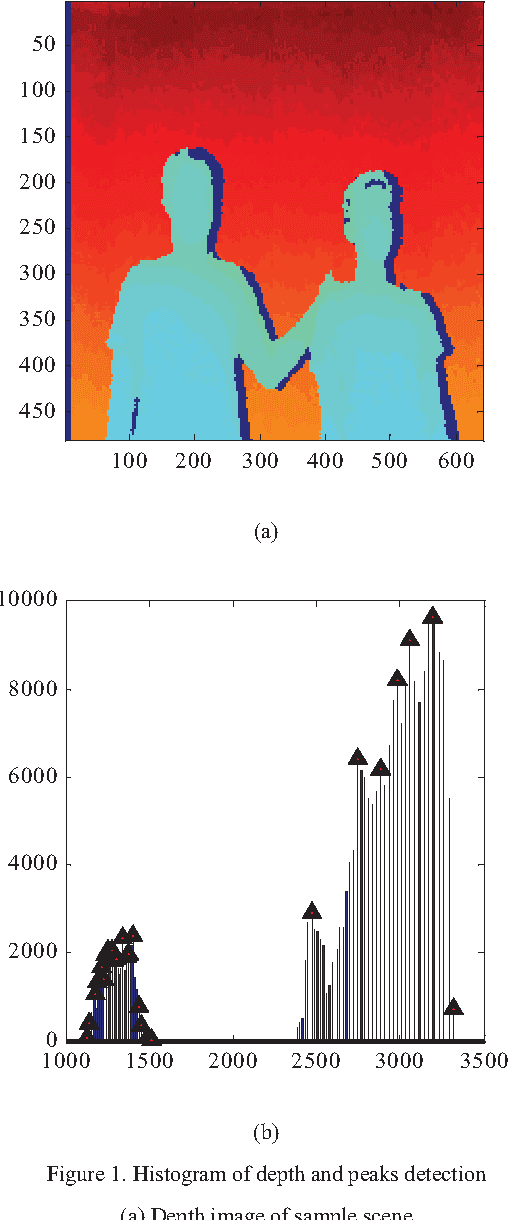
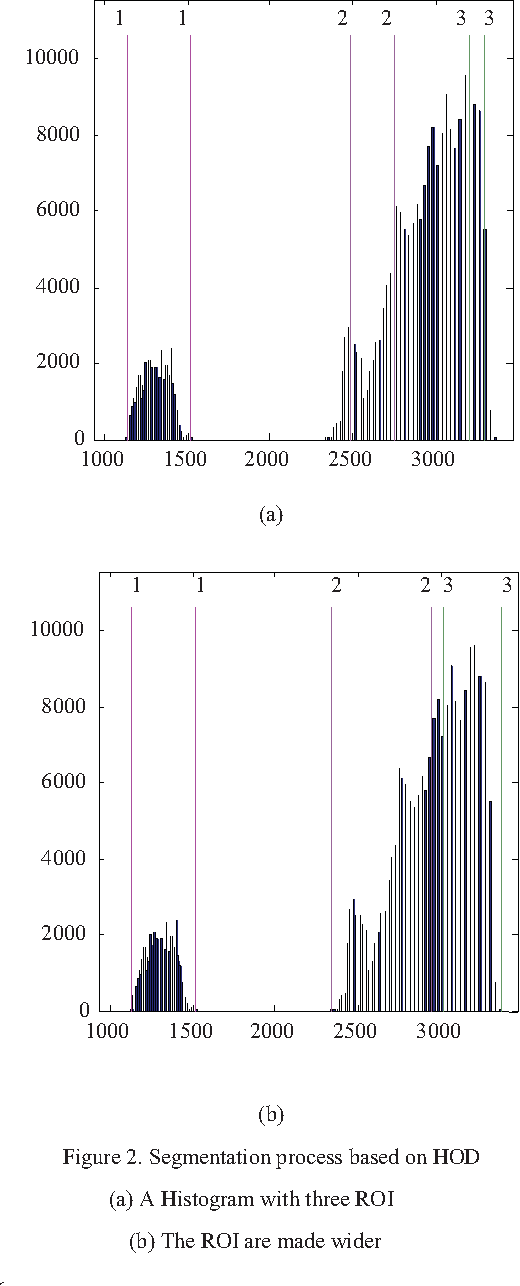
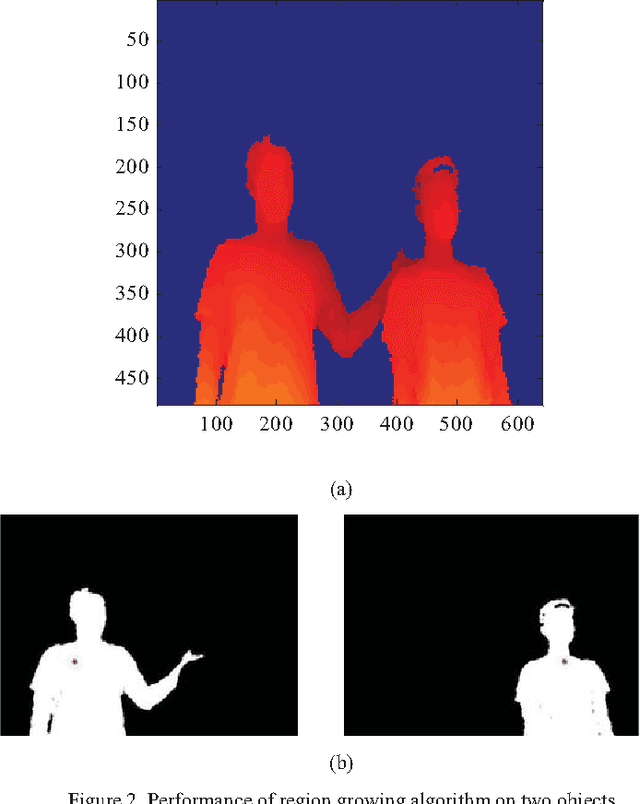
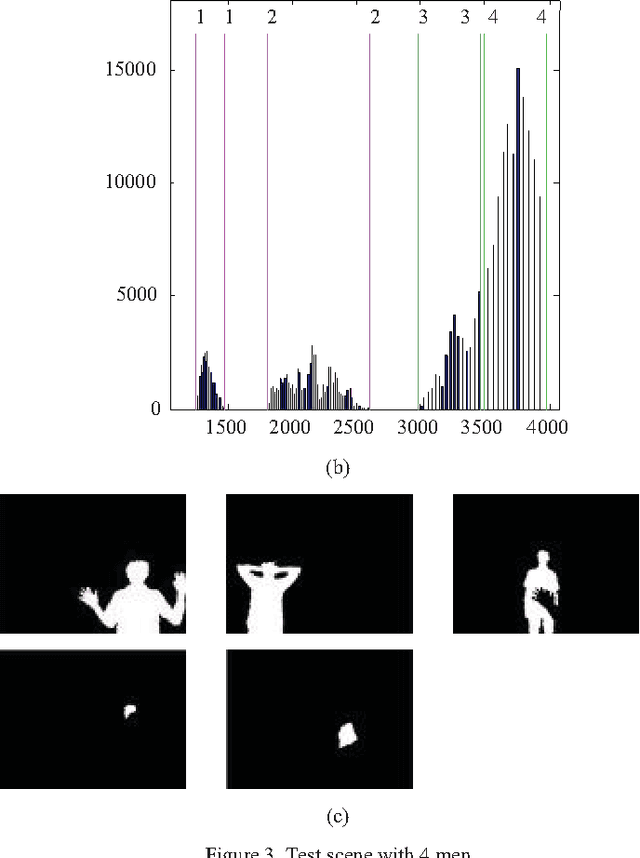
This study proposes an approach to segment human object from a depth image based on histogram of depth values. The region of interest is first extracted based on a predefined threshold for histogram regions. A region growing process is then employed to separate multiple human bodies with the same depth interval. Our contribution is the identification of an adaptive growth threshold based on the detected histogram region. To demonstrate the effectiveness of the proposed method, an application in driver distraction detection was introduced. After successfully extracting the driver's position inside the car, we came up with a simple solution to track the driver motion. With the analysis of the difference between initial and current frame, a change of cluster position or depth value in the interested region, which cross the preset threshold, is considered as a distracted activity. The experiment results demonstrated the success of the algorithm in detecting typical distracted driving activities such as using phone for calling or texting, adjusting internal devices and drinking in real time.