 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM2GAN: A Multi-Stage Self-Attention Network for Image Rain Removal on Autonomous Vehicles
Paper and Code
Oct 12, 2021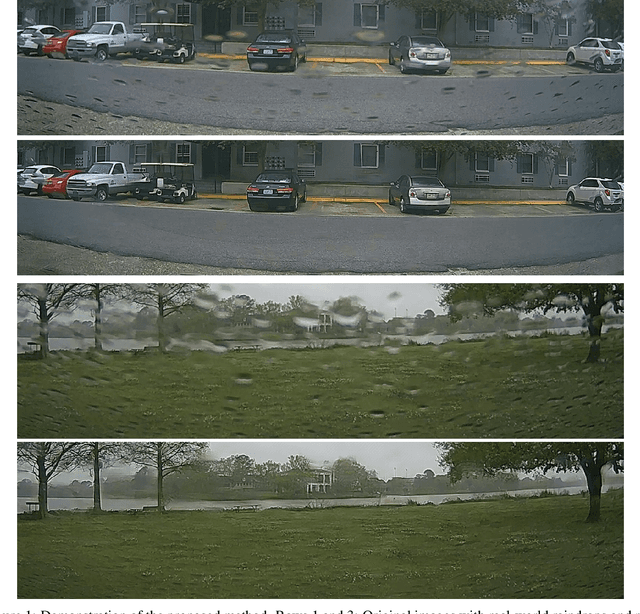
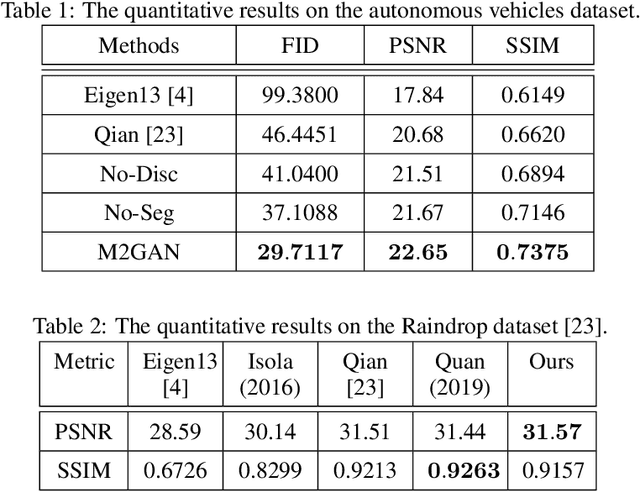
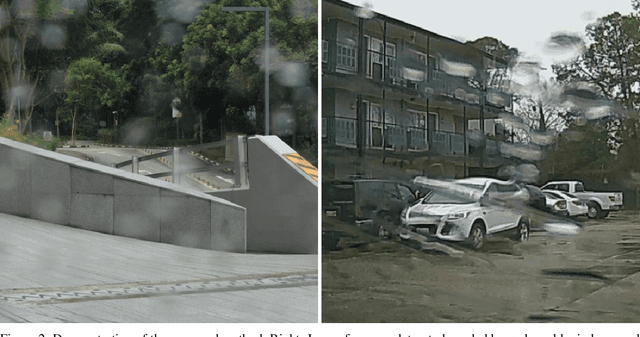
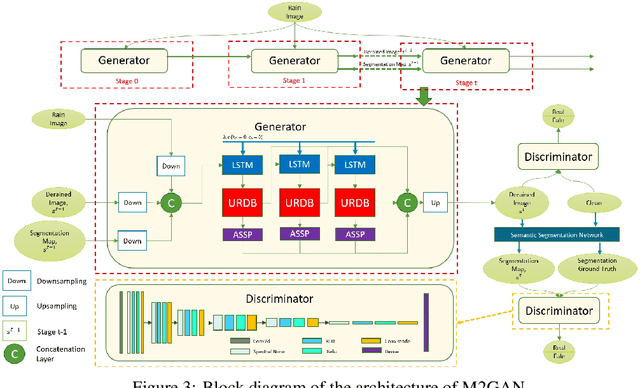
Image deraining is a new challenging problem in applications of autonomous vehicles. In a bad weather condition of heavy rainfall, raindrops, mainly hitting the vehicle's windshield, can significantly reduce observation ability even though the windshield wipers might be able to remove part of it. Moreover, rain flows spreading over the windshield can yield the physical effect of refraction, which seriously impede the sightline or undermine the machine learning system equipped in the vehicle. In this paper, we propose a new multi-stage multi-task recurrent generative adversarial network (M2GAN) to deal with challenging problems of raindrops hitting the car's windshield. This method is also applicable for removing raindrops appearing on a glass window or lens. M2GAN is a multi-stage multi-task generative adversarial network that can utilize prior high-level information, such as semantic segmentation, to boost deraining performance. To demonstrate M2GAN, we introduce the first real-world dataset for rain removal on autonomous vehicles. The experimental results show that our proposed method is superior to other state-of-the-art approaches of deraining raindrops in respect of quantitative metrics and visual quality. M2GAN is considered the first method to deal with challenging problems of real-world rains under unconstrained environments such as autonomous vehicles.